Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 7SOMAY
abf77bfb75
7SOMAY
abf77bfb75
|
11 months ago | |
|---|---|---|
| .. | ||
| assets/simulation | 11 months ago | |
| configs | 11 months ago | |
| graphs | 11 months ago | |
| nodes | 11 months ago | |
| ASSEMBLING.md | 11 months ago | |
| CONFIGURING.md | 11 months ago | |
| INSTALLATION.md | 11 months ago | |
| README.md | 11 months ago | |
| RECORDING.md | 11 months ago | |
| bus.py | 11 months ago | |
| configure.py | 11 months ago | |
README.md
Dora pipeline Robots
AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains
the Dora pipeline to record episodes for LeRobot.
Assembling
Check the ASSEMBLING.md file for instructions on how to assemble the robot from scratch using the
provided parts from the AlexK Low Cost Robot
Installation
Check the INSTALLATION.md file for instructions on how to install the required software and
environment
to run the robot.
Configuring
Check the CONFIGURING.md file for instructions on how to configure the robot to record episodes for
LeRobot and teleoperate the robot.
Recording
It's probably better to check the examples below before trying to record episodes. It will give you a
better
understanding of how Dora works.
Check the RECORDING.md file for instructions on how to record episodes for LeRobot.
Examples
There are also some other example applications in the graphs folder. Have fun!
Here is a list of the available examples:
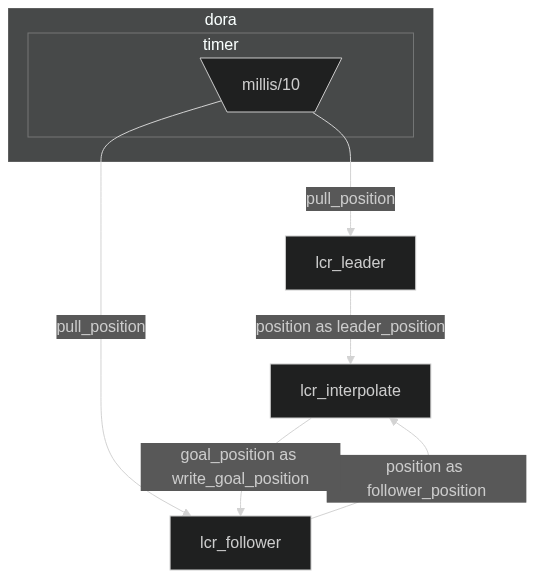
mono_teleop_real.yml: A simple real teleoperation pipeline that allows you to control a follower arm using a leader
arm. It
does not record the episodes, so you don't need to have a camera.
You must configure the arms, retrieve the device port, and modify the file mono_teleop_real.yml to set the correct
environment variables. (e.g. PORT and CONFIG, LEADER_CONTROL and FOLLOWER_CONTROL)
cd dora/
# If you are using a custom environment, you will have to activate it before running the command
source [your_custom_env_bin]/activate
# If you followed the installation instructions, you can run the following command
source venv/bin/activate # On Linux
source venv/Scripts/activate # On Windows bash
venv\Scripts\activate.bat # On Windows cmd
venv\Scripts\activate.ps1 # On Windows PowerShell
dora build ./examples/alexk-lcr/graphs/mono_teleop_real.yml # Only the first time, it will install all the requirements if needed
dora up
dora start ./examples/alexk-lcr/graphs/mono_teleop_real.yml
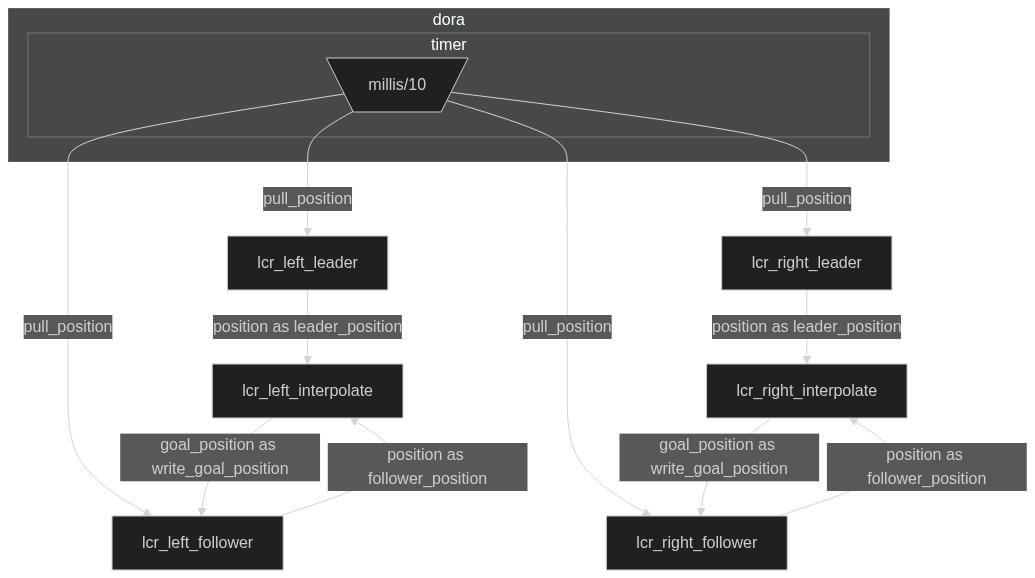
bi_teleop_real.yml: A simple real tele operation pipeline that allows you to control two follower arm using two
leader arm
(left and right). It does not record the episodes, so you don't need to have a camera.
You must configure the arms, retrieve the device port, and modify the file bi_teleop_real.yml to set the correct
environment variables. (e.g. PORT and CONFIG)
cd dora/
# If you are using a custom environment, you will have to activate it before running the command
source [your_custom_env_bin]/activate
# If you followed the installation instructions, you can run the following command
source venv/bin/activate # On Linux
source venv/Scripts/activate # On Windows bash
venv\Scripts\activate.bat # On Windows cmd
venv\Scripts\activate.ps1 # On Windows PowerShell
dora build ./examples/alexk-lcr/graphs/bi_teleop_real.yml # Only the first time, it will install all the requirements if needed
dora up
dora start ./examples/alexk-lcr/graphs/bi_teleop_real.yml
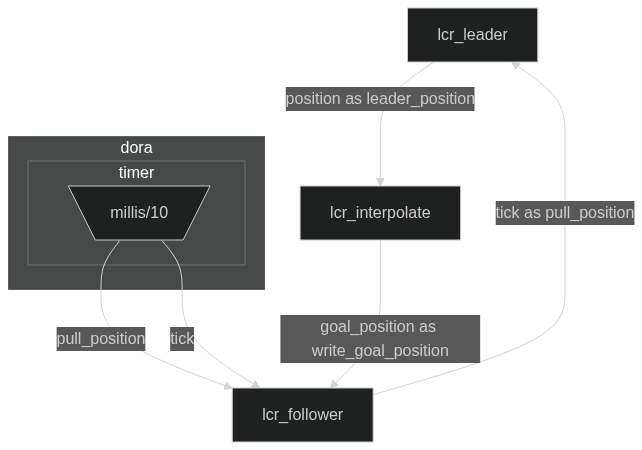
mono_teleop_simu.yml: A simple simulation tele operation pipeline that allows you to control a simulated follower
arm using a leader arm. It does not record the episodes, so you don't need to have a camera.
You must configure the arms, retrieve the device port, and modify the file mono_teleop_simu.yml to set the correct
environment variables. (e.g. PORT and CONFIG)
cd dora/
# If you are using a custom environment, you will have to activate it before running the command
source [your_custom_env_bin]/activate
# If you followed the installation instructions, you can run the following command
source venv/bin/activate # On Linux
source venv/Scripts/activate # On Windows bash
venv\Scripts\activate.bat # On Windows cmd
venv\Scripts\activate.ps1 # On Windows PowerShell
dora build ./examples/alexk-lcr/graphs/mono_teleop_simu.yml # Only the first time, it will install all the requirements if needed
dora up
dora start ./examples/alexk-lcr/graphs/mono_teleop_simu.yml
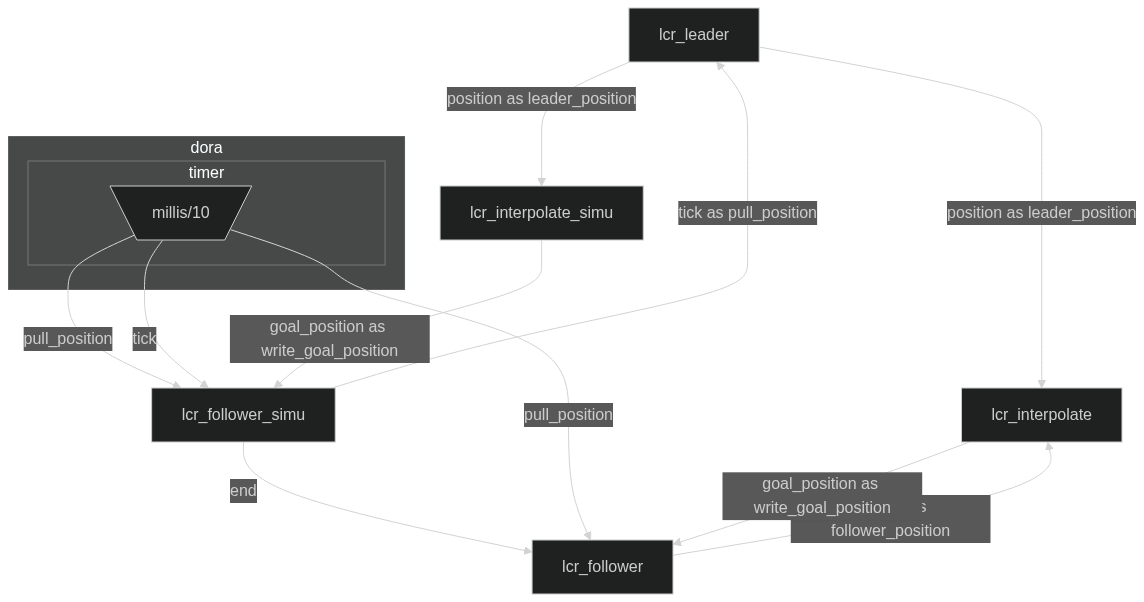
mono_teleop_real_and_simu.yml: A simple real and simulation tele operation pipeline that allows you to control a
simulated and real follower arm using a real leader arm. It does not record the episodes, so you don't need to have a
camera.
You must configure the arms, retrieve the device port, and modify the file mono_teleop_real_and_simu.yml to set the
correct
environment variables. (e.g. PORT and CONFIG)
cd dora/
# If you are using a custom environment, you will have to activate it before running the command
source [your_custom_env_bin]/activate
# If you followed the installation instructions, you can run the following command
source venv/bin/activate # On Linux
source venv/Scripts/activate # On Windows bash
venv\Scripts\activate.bat # On Windows cmd
venv\Scripts\activate.ps1 # On Windows PowerShell
dora build ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml # Only the first time, it will install all the requirements if needed
dora up
dora start ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml
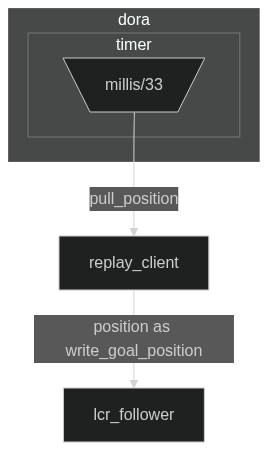
mono_replay_real.yml: A simple real replay pipeline that allows you to replay a recorded episode.
You must configure the dataset path and episode index in the file mono_replay_real.yml to set the correct
environment variables. (e.g. PATH, EPISODE). You must also configure the follower arm, retrieve the device port, and
modify the file mono_replay_real.yml to set the correct environment variables. (e.g. PORT and CONFIG)
cd dora/
# If you are using a custom environment, you will have to activate it before running the command
source [your_custom_env_bin]/activate
# If you followed the installation instructions, you can run the following command
source venv/bin/activate # On Linux
source venv/Scripts/activate # On Windows bash
venv\Scripts\activate.bat # On Windows cmd
venv\Scripts\activate.ps1 # On Windows PowerShell
dora build ./examples/alexk-lcr/graphs/mono_replay_real.yml # Only the first time, it will install all the requirements if needed
dora up
dora start ./examples/alexk-lcr/graphs/mono_replay_real.yml
License
This library is licensed under the Apache License 2.0.
DORA (Dataflow-Oriented Robotic Architecture) is middleware designed to streamline and simplify the creation of AI-based robotic applications. It offers low latency, composable, and distributed datafl
Rust Python TOML Markdown C other
Contributors (25+)
dev@phil-opp.com
tao.xavier@outlook.com
yuma.hiramatsu@gmail.com
shashwatpatil974@gmail.com
xuxchang@hotmail.com
tao.xavier@1ms.ai
ward.michael.j@gmail.com
sharjeelsajid09@gmail.com
29139614+renovate[bot]@users.noreply.github.com
haroon152018@gmail.com
dev@enzo-le-van.fr
matiurrehman017@gmail.com
ericlbuehler@gmail.com
49699333+dependabot[bot]@users.noreply.github.com
ssomay2002@gmail.com
chris@acroidea.com
sjfhsjfh@qq.com
somay.a4p@ap.denso.com
45980096+heyong4725@users.noreply.github.com
echo_ai@foxmail.com
mivikq@gmail.com
hai-xuan.tao@student.ecp.fr
1754165401@qq.com
4655609+bobd988@users.noreply.github.com
2891067867@qq.com