Browse Source
correct most of the documentation with updated folder structure in examples
tags/v0.3.11-rc1 Rahat2134
11 months ago
Rahat2134
11 months ago
15 changed files with 57 additions and 57 deletions
Split View
Diff Options
-
+4 -4examples/alexk-lcr/CONFIGURING.md
-
+4 -4examples/alexk-lcr/INSTALLATION.md
-
+15 -15examples/alexk-lcr/README.md
-
+4 -4examples/alexk-lcr/RECORDING.md
-
+2 -2examples/alexk-lcr/configure.py
-
+3 -3examples/aloha/ASSEMBLING.md
-
+4 -4examples/aloha/CONFIGURING.md
-
+4 -4examples/aloha/INSTALLATION.md
-
+1 -1examples/reachy/README.md
-
+1 -1examples/reachy1/README.md
-
+2 -2examples/so100/CONFIGURING.md
-
+4 -4examples/so100/INSTALLATION.md
-
+3 -3examples/so100/README.md
-
+4 -4examples/so100/RECORDING.md
-
+2 -2examples/so100/configure.py
+ 4
- 4
examples/alexk-lcr/CONFIGURING.md
View File
| @@ -33,7 +33,7 @@ recommend using our on-board tool to set all of that automatically: | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -44,7 +44,7 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./robots/alexk-lcr/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| python ./examples/alexk-lcr/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
| @@ -58,7 +58,7 @@ python ./robots/alexk-lcr/configure.py --port /dev/ttyUSB0 --follower --left # ( | |||
| - Repeat the same steps for the Leader arm: | |||
| ```bash | |||
| python ./robots/alexk-lcr/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| python ./examples/alexk-lcr/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB1` to the device port you retrieved from the official wizard (like `COM4` on Windows). | |||
| @@ -77,7 +77,7 @@ nodes: | |||
| - id: lcr-follower | |||
| env: | |||
| PORT: /dev/ttyUSB0 | |||
| CONFIG: ../configs/follower.left.json # relative path to `./robots/alexk-lcr/configs/follower.json` | |||
| CONFIG: ../configs/follower.left.json # relative path to `./examples/alexk-lcr/configs/follower.json` | |||
| - id: lcr-to-lcr | |||
| env: | |||
+ 4
- 4
examples/alexk-lcr/INSTALLATION.md
View File
| @@ -27,13 +27,13 @@ you may need to setup your Python environment: | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora-lerobot | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| @@ -56,14 +56,14 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r robots/alexk-lcr/requirements.txt | |||
| pip install -r examples/alexk-lcr/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r robots/alexk-lcr/development.txt # You **MUST** be inside dora-lerobot to run this command, not robots/alexk-lcr | |||
| pip install -r examples/alexk-lcr/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
+ 15
- 15
examples/alexk-lcr/README.md
View File
| @@ -41,7 +41,7 @@ You must configure the arms, retrieve the device port, and modify the file `mono | |||
| environment variables. (e.g. `PORT` and `CONFIG`, `LEADER_CONTROL` and `FOLLOWER_CONTROL`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -52,10 +52,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/mono_teleop_real.yml | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_real.yml | |||
| ``` | |||
| [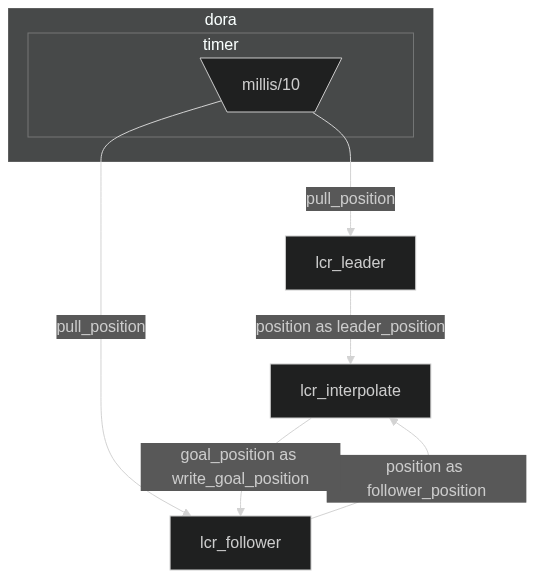](https://mermaid.live/edit#pako:eNqVUsFOxCAQ_RUy591Urz14MF496W0xZCzTlkihmUI2ZrP_LtDtutomRg4w83jvMcCcoPGaoAZxGa31x6ZHDuL1UTohbMPKEmriJTMuEI_eYqAFar1NskyZ4nvHOPZCKaU9Y1rEIQdvmXu7G8xAfJkzqUSFJUQWVAWoBmOtmar7u4OU17gqPHJaujJtK8R-L8ZorRr9ZILxLgEPGxdaqi_8hYqTWPC1fuMJZsvfFjP6p8H_qv9-7dWHZFHn8UaUijiyCaR-wmsv2EE6f0CjUzecsreE0NNAEuoUauQPCdKdEw9j8C-froE6cKQdsI9dD3WLdkpZHHWq5Mlg-urhipI2wfPz3Gyl585fka3hkA) | |||
| @@ -68,7 +68,7 @@ You must configure the arms, retrieve the device port, and modify the file `bi_t | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -79,10 +79,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/bi_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/bi_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/bi_teleop_real.yml | |||
| dora start ./examples/alexk-lcr/graphs/bi_teleop_real.yml | |||
| ``` | |||
| [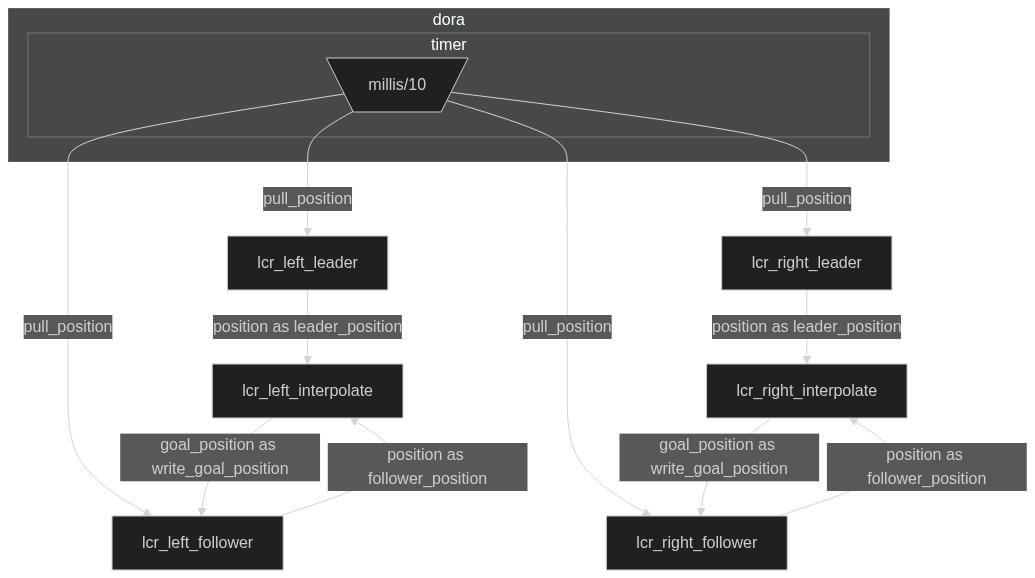](https://mermaid.live/edit#pako:eNqlVMFugzAM_ZUo51ZsVw47TLvutN2aKsqIgWghQSZRNVX99yWhtAXBNjoOxrz4vdgmzpEWVgLNKTk_pbaHohboyPszM4ToArmG0gUjJOAIUsYBtlYLByO8tDqoXINRVfVUoMdmFPqFq0TnPyoUbU0459KiCC-yi84-Mm5XnWoAzzYGJS9FERIJWQKyRmmtuuzxYcfYxc9SHBjJTDLzDLLdktZrzVvbKaesCcDTjy0a6kjMgSQ6MuALSkud7XeYivXo36TuKGv6O6eykV5ZcUMPOR1QOeBjeFF1XVLLx2l9t385huv6PSt2T23zA_Sflk916YaGjBqhZJj9Y9yHUVdDA4zmwZUCPxll5hTihHf27csUNHfoYUPR-qqmeSl0F758K0M-L0qEMWwuKEjlLL72V0u6YU7fOOqbHg) | |||
| @@ -94,7 +94,7 @@ You must configure the arms, retrieve the device port, and modify the file `mono | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| @@ -106,10 +106,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/mono_teleop_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/mono_teleop_simu.yml | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_simu.yml | |||
| ``` | |||
| [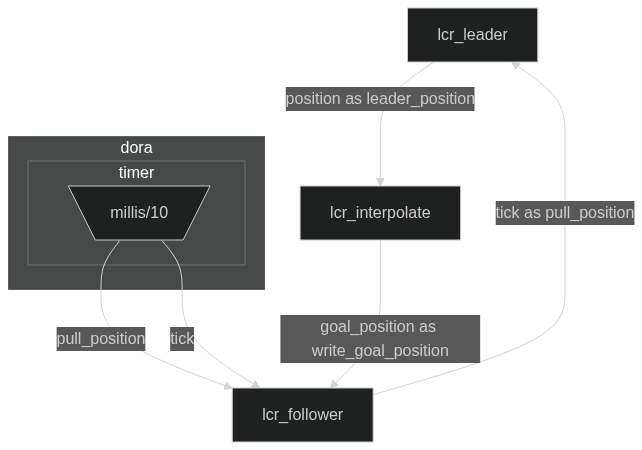](https://mermaid.live/edit#pako:eNp1UstuwyAQ_JUV50Rurz70UPXaU3sLFdqatY2CwcKgqIry711w4ubhcoDdYWZ3eBxF4zWJWsB5tNYfmh5DhM9X6QBsE5Ql1BQumXGRwugtRrpArbcsy5QpfXcBxx6UUtoH5AV2OfjK3OvdaAYK5zmTSlRYAFlQFaAajLVmqp6fdlIucVV45LR0Zbp1AdstRNPsAScYk7Vq9JOJxjveeFk50Jxl1UJk5Yw-au-Ov2a1lFpt_HdR_yuL9TXBXffM7TxedWHXh2AiqVv4sZbYCG47oNH88sdcW4rY00BS1BxqDHsppDsxD1P0Hz-uEXUMiTYi-NT1om7RTpylUbOTN4P8rMOCkjbRh_f5Y5X_dfoF5ZjY9g) | |||
| @@ -123,7 +123,7 @@ correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| @@ -135,10 +135,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/mono_teleop_real_and_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/mono_teleop_real_and_simu.yml | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml | |||
| ``` | |||
| [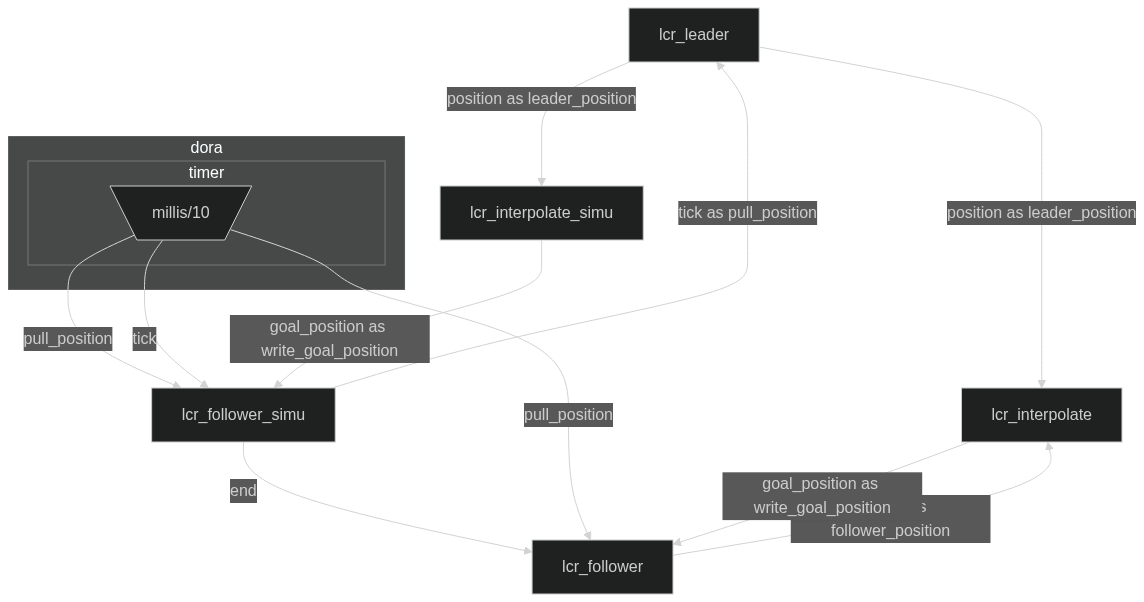](https://mermaid.live/edit#pako:eNqdU8luwyAQ_RXEOZHbqw89VL321N5ChajBMQqLxaKoivLvHXCM3IS0lX3Aw-O9YRbmhDvLBW4xuny9ssduYC6g92diEFKdo0owLty8kyYIN1rFgpih3iqQVSnUSx2veRfQx8-9Y-OAKKXcOgY_tEvGRxIsT4PUoJrWRMpWZiGUBE0GGi2Vkr55fNgRUuwm84ThxOSlEgrablGQ3QExj8aoFB2tl0FaAwdPlRLM4qQrVNAWpzf6StEml9cuJvRfDm5SgPQKf9mSWoXyvdVUf2lmEu0tW4gg4qOT0Oaf8D1fq3Muz2hdLn_Kc_fvqmrBrK5FVuMNhhg0kxxm75TuIDgMQguCWzA5cweCiTkDj8Vg375Mh9vgothgZ-N-wG3PlIddHDlE9CIZzIouqOAyWPc6jXae8PM3I_doSQ) | |||
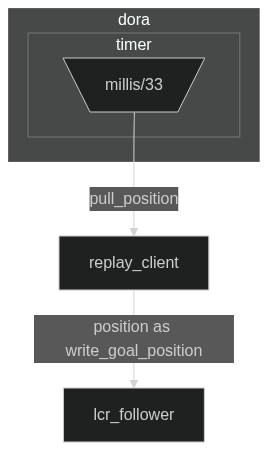
| @@ -150,7 +150,7 @@ environment variables. (e.g. `PATH`, `EPISODE`). You must also configure the fol | |||
| modify the file `mono_replay_real.yml` to set the correct environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -161,10 +161,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/mono_replay_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/mono_replay_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/mono_replay_real.yml | |||
| dora start ./examples/alexk-lcr/graphs/mono_replay_real.yml | |||
| ``` | |||
| [](https://mermaid.live/edit#pako:eNptkbFuAyEMhl_F8pzohmw3dKiydmq3UCH38N2hcoB8oCiK8u4BmkZNWwbz8_PZCPuMQzCMPcJtjS4ch5kkwduz8gDC0dFJD86yT9Vwg-gxuIKxKL_mj0kozqC1NkGobHCo4r2yP2-TXVhusUJNNQqgJnTN6BbrnF273e6g1F13jWNvlG_h_wzYbiFm53QMq002-GI8_f3Ag9FyvnFa4Sg2sZ4C_ary-GvcYHl5IWtK5861qMI088IK-yINyadC5S-Fo5zC68kP2CfJvEEJeZqxH8mt5ZSjocR7S6VNy91lY1OQl6_BtPlcrmjBlKg) | |||
+ 4
- 4
examples/alexk-lcr/RECORDING.md
View File
| @@ -26,7 +26,7 @@ Make sure to: | |||
| You can now start the Dora pipeline to record episodes for LeRobot: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -37,10 +37,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/alexk-lcr/graphs/record_mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/alexk-lcr/graphs/record_mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/alexk-lcr/graphs/record_mono_teleop_real.yml | |||
| dora start ./examples/alexk-lcr/graphs/record_mono_teleop_real.yml | |||
| ``` | |||
| Then, you can tele operate the follower with the leader. A window will pop up showing the camera feed, and some text. | |||
| @@ -55,7 +55,7 @@ Then, you can tele operate the follower with the leader. A window will pop up sh | |||
| You can now use our script to convert the logs to an understandable dataset: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
+ 2
- 2
examples/alexk-lcr/configure.py
View File
| @@ -180,9 +180,9 @@ def main(): | |||
| path = ( | |||
| input( | |||
| f"Please enter the path of the configuration file (default is ./robots/alexk-lcr/configs/{leader}.{left}.json): " | |||
| f"Please enter the path of the configuration file (default is ./examples/alexk-lcr/configs/{leader}.{left}.json): " | |||
| ) | |||
| or f"./robots/alexk-lcr/configs/{leader}.{left}.json" | |||
| or f"./examples/alexk-lcr/configs/{leader}.{left}.json" | |||
| ) | |||
| with open(path, "w") as file: | |||
+ 3
- 3
examples/aloha/ASSEMBLING.md
View File
| @@ -39,10 +39,10 @@ the Dora pipeline to manipulate arms, cameras, and record/replay episodes with L | |||
| > You have an example of the given rules in `hardware_config.yml`. | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| sudo cp robots/aloha/hardware_config/99-interbotix-udev.rules /etc/udev/rules.d | |||
| sudo cp robots/aloha/hardware_config/99-fixed-interbotix-udev.rules /etc/udev/rules.d | |||
| sudo cp examples/aloha/hardware_config/99-interbotix-udev.rules /etc/udev/rules.d | |||
| sudo cp examples/aloha/hardware_config/99-fixed-interbotix-udev.rules /etc/udev/rules.d | |||
| ``` | |||
| - To apply the changes, run `sudo udevadm control --reload && sudo udevadm trigger` | |||
+ 4
- 4
examples/aloha/CONFIGURING.md
View File
| @@ -33,7 +33,7 @@ recommend using our on-board tool to set all of that automatically: | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -44,7 +44,7 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./robots/aloha/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| python ./examples/aloha/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
| @@ -58,7 +58,7 @@ TODO: image for aloha | |||
| - Repeat the same steps for the Leader arm: | |||
| ```bash | |||
| python ./robots/aloha/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| python ./examples/aloha/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB1` to the device port you retrieved from the official wizard (like `COM4` on Windows). | |||
| @@ -77,7 +77,7 @@ nodes: | |||
| - id: aloha-follower | |||
| env: | |||
| PORT: /dev/ttyUSB0 | |||
| CONFIG: ../configs/follower.left.json # relative path to `./robots/aloha/configs/follower.json` | |||
| CONFIG: ../configs/follower.left.json # relative path to `./examples/aloha/configs/follower.json` | |||
| - id: aloha-to-aloha | |||
| env: | |||
+ 4
- 4
examples/aloha/INSTALLATION.md
View File
| @@ -27,13 +27,13 @@ you may need to setup your Python environment: | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora-lerobot | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| @@ -56,14 +56,14 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r robots/so100/requirements.txt | |||
| pip install -r examples/so100/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r robots/aloha/development.txt # You **MUST** be inside dora-lerobot to run this command, not robots/aloha | |||
| pip install -r examples/aloha/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
+ 1
- 1
examples/reachy/README.md
View File
| @@ -26,7 +26,7 @@ cd .. | |||
| git clone https://github.com/pollen-robotics/reachy2_hdf5_recorder/ | |||
| ``` | |||
| #### Installation dora-lerobot | |||
| #### Installation dora | |||
| ```bash | |||
| ## Create new python environment | |||
+ 1
- 1
examples/reachy1/README.md
View File
| @@ -26,7 +26,7 @@ cd .. | |||
| git clone https://github.com/pollen-robotics/reachy2_hdf5_recorder/ | |||
| ``` | |||
| #### Installation dora-lerobot | |||
| #### Installation dora | |||
| ```bash | |||
| ## Create new python environment | |||
+ 2
- 2
examples/so100/CONFIGURING.md
View File
| @@ -33,7 +33,7 @@ recommend using our on-board tool to set all of that automatically: | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -44,7 +44,7 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./robots/so100/configure.py --port /dev/ttyUSB0 --follower --left | |||
| python ./examples/so100/configure.py --port /dev/ttyUSB0 --follower --left | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
+ 4
- 4
examples/so100/INSTALLATION.md
View File
| @@ -27,13 +27,13 @@ you may need to setup your Python environment: | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora-lerobot | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| @@ -56,14 +56,14 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r robots/so100/requirements.txt | |||
| pip install -r examples/so100/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r robots/so100/development.txt # You **MUST** be inside dora-lerobot to run this command, not robots/so100 | |||
| pip install -r examples/so100/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
+ 3
- 3
examples/so100/README.md
View File
| @@ -46,7 +46,7 @@ the correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`, `LEADER_CONTROL` and `FOLLOWER_CONTROL`) | |||
| ```bash | |||
| cd dora-lerobot/ | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -57,10 +57,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/so100/graphs/mono_teleop_real_with_alexk_lcr.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/so100/graphs/mono_teleop_real_with_alexk_lcr.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/so100/graphs/mono_teleop_real_with_alexk_lcr.yml | |||
| dora start ./examples/so100/graphs/mono_teleop_real_with_alexk_lcr.yml | |||
| ``` | |||
| ## License | |||
+ 4
- 4
examples/so100/RECORDING.md
View File
| @@ -26,7 +26,7 @@ Make sure to: | |||
| You can now start the Dora pipeline to record episodes for LeRobot: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| @@ -37,10 +37,10 @@ source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./robots/so100/graphs/record_mono_teleop_real_with_alexk_lcr.yml # Only the first time, it will install all the requirements if needed | |||
| dora build ./examples/so100/graphs/record_mono_teleop_real_with_alexk_lcr.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./robots/so100/graphs/record_mono_teleop_real_with_alexk_lcr.yml | |||
| dora start ./examples/so100/graphs/record_mono_teleop_real_with_alexk_lcr.yml | |||
| ``` | |||
| Then, you can tele operate the follower with the leader. A window will pop up showing the camera feed, and some text. | |||
| @@ -55,7 +55,7 @@ Then, you can tele operate the follower with the leader. A window will pop up sh | |||
| You can now use our script to convert the logs to an understandable dataset: | |||
| ```bash | |||
| cd dora-lerobot | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
+ 2
- 2
examples/so100/configure.py
View File
| @@ -149,9 +149,9 @@ def main(): | |||
| left = "left" if args.left else "right" | |||
| path = ( | |||
| input( | |||
| f"Please enter the path of the configuration file (default is ./robots/so100/configs/follower.{left}.json): " | |||
| f"Please enter the path of the configuration file (default is ./examples/so100/configs/follower.{left}.json): " | |||
| ) | |||
| or f"./robots/so100/configs/follower.{left}.json" | |||
| or f"./examples/so100/configs/follower.{left}.json" | |||
| ) | |||
| with open(path, "w") as file: | |||