Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 Philipp Oppermann
e9f102caa7
Philipp Oppermann
e9f102caa7
|
1 year ago | |
|---|---|---|
| .github | 1 year ago | |
| apis | 1 year ago | |
| binaries | 1 year ago | |
| docs/src | 2 years ago | |
| examples | 1 year ago | |
| libraries | 1 year ago | |
| .gitignore | 2 years ago | |
| CONTRIBUTING.md | 2 years ago | |
| Cargo.lock | 1 year ago | |
| Cargo.toml | 2 years ago | |
| Changelog.md | 2 years ago | |
| LICENSE | 3 years ago | |
| NOTICE.md | 3 years ago | |
| README.md | 2 years ago | |
| rust-toolchain.toml | 2 years ago | |
README.md
![]()
Website | Python API - Rust API | Guide | Discord


Why dora-rs?
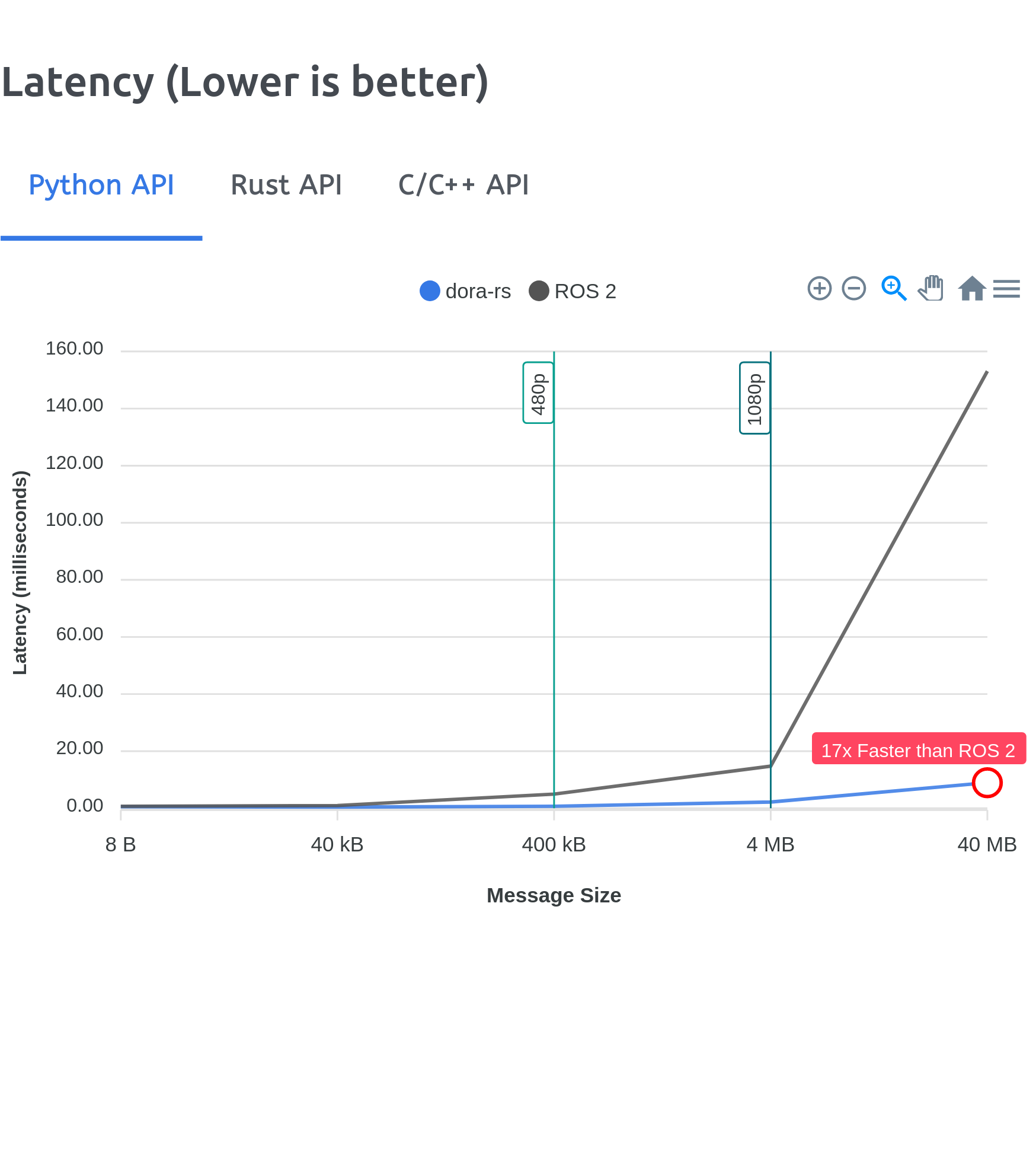
In 2023, AI is booming! Robotic framework however hasn't changed much in years... This is why we create dora-rs! dora-rs is a new robotic framework that brings modernity into robotic application.
dora-rs can already show impressive performance, up to 17x speedup compared to ROS2 in Python! This is the result of using our own shared memory server and Apache Arrow to achieve zero copy!
Those performance improvements make a world of difference for beginners, AI practitioners, and weekend hobbyists who have been limited by the lack of support for Python in this field!
But, dora-rs is still experimental and we're still working on many features such as:
- dora-ros2-bridge to bridge dora and ros 2!
- dora-rs for Deep Learning applications, to make it easy to integrate state of the art DL model and hopefully train them within the framework.
Feel free to reach out if you have any questions!
Installation
Quickest way:
cargo install dora-cli
pip install dora-rs ## For Python API
dora --help
For more installation guideline, check out our installation guide here: https://dora.carsmos.ai/docs/guides/Installation/installing
Getting Started
- Install the example python dependencies:
pip install -r https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/requirements.txt
- Get some example operators:
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/webcam.py
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/plot.py
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/utils.py
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/object_detection.py
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.2/examples/python-operator-dataflow/dataflow.yml
- Start the dataflow
dora up
dora start dataflow.yml --attach --hot-reload
Make sure to have a webcam
To stop your dataflow, you can use ctrl+c
To go further, you can add a yolov5 operator, check out our getting started here: https://dora.carsmos.ai/docs/guides/getting-started/yolov5
Documentation
The full documentation is available on our website: https://dora.carsmos.ai
Discussions
Our main communication channels are:
Feel free to reach out on any topic, issues or ideas.
We also have a contributing guide.
License
This project is licensed under Apache-2.0. Check out NOTICE.md for more information.
DORA (Dataflow-Oriented Robotic Architecture) is middleware designed to streamline and simplify the creation of AI-based robotic applications. It offers low latency, composable, and distributed datafl
Rust Python TOML Markdown C other
Contributors (14)
dev@phil-opp.com
tao.xavier@outlook.com
yuma.hiramatsu@gmail.com
49699333+dependabot[bot]@users.noreply.github.com
xuxchang@hotmail.com
45980096+heyong4725@users.noreply.github.com
hai-xuan.tao@student.ecp.fr
arenas@aliyun.com
4655609+bobd988@users.noreply.github.com
=
77993249+Felixhuangsiling@users.noreply.github.com
99924265+wlee-fw@users.noreply.github.com
jerry73204@gmail.com
messense@icloud.com