Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 Leon
735d2af6c5
Leon
735d2af6c5
|
9 months ago | |
|---|---|---|
| .. | ||
| src | 10 months ago | |
| .env_example | 1 year ago | |
| Cargo.toml | 10 months ago | |
| README.md | 9 months ago | |
| pyproject.toml | 10 months ago | |
README.md
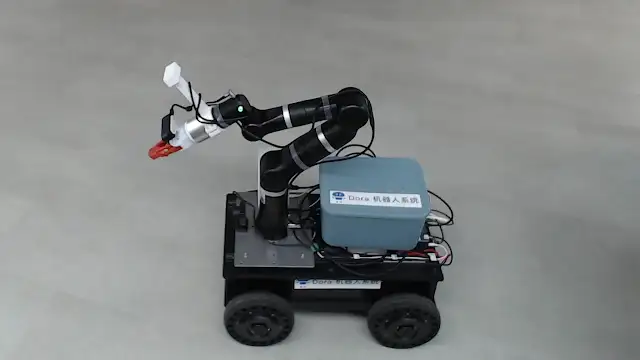
dora-kit-car control
Introduce
Dora Kit Car is a DORA node for controlling a differential-drive mobile robot to move forward/backward and turn left/right. Developed in Rust with Python API support.
Highlights
- Compatible with the ROS geometry_msgs/Twist.msg format, utilizing only:
- linear.x (positive: forward movement, negative: backward movement)
- angular.z (positive: left turn, negative: right turn)
Raw Message Definition
Accepts an array of six f64's
- six f64 array [x, y, z, rx, ry, rz] only used x, rz
see https://docs.ros.org/en/noetic/api/geometry_msgs/html/msg/Twist.html
Environment
Adds an environment variable SERIAL_PORT to specify the serial port for the car device, with /dev/ttyUSB0 as the default value
Demo Video
Getting Started
nodes:
- id: keyboard-listener # Run on car
build: pip install dora-keyboard
path: dora-keyboard
inputs:
tick: dora/timer/millis/10
outputs:
- twist # for example [2.0,0.0,0.0,0.0,0.0,1.0]
- id: car
build: pip install dora-kit-car
path: dora-kit-car
inputs:
keyboard: keyboard-listener/twist
env:
SERIAL_PORT: /dev/ttyUSB0
License
The MIT License (MIT)
Copyright (c) 2024-present, Leon
DORA (Dataflow-Oriented Robotic Architecture) is middleware designed to streamline and simplify the creation of AI-based robotic applications. It offers low latency, composable, and distributed datafl
Rust Python TOML Markdown C other
Contributors (25+)
dev@phil-opp.com
tao.xavier@outlook.com
yuma.hiramatsu@gmail.com
xuxchang@hotmail.com
shashwatpatil974@gmail.com
ward.michael.j@gmail.com
sharjeelsajid09@gmail.com
29139614+renovate[bot]@users.noreply.github.com
haroon152018@gmail.com
dev@enzo-le-van.fr
tao.xavier@1ms.ai
matiurrehman017@gmail.com
ericlbuehler@gmail.com
49699333+dependabot[bot]@users.noreply.github.com
ssomay2002@gmail.com
somay.a4p@ap.denso.com
45980096+heyong4725@users.noreply.github.com
echo_ai@foxmail.com
mivikq@gmail.com
hai-xuan.tao@student.ecp.fr
1754165401@qq.com
4655609+bobd988@users.noreply.github.com
2891067867@qq.com
moneymindedmunish1@gmail.com
arnavkhan4343@gmail.com