Browse Source
Migrate robots from dora-lerobot to dora repository (#868)
Changes Migrated the entire robots directory from dora-lerobot to examples/dora-lerobot/robots in the dora repository Updated references in updated files. Purpose This migration consolidates robot examples into the main dora repository, making it easier for users to discover and use these components without needing to clone a separate repository.tags/v0.3.11-rc1
 Haixuan Xavier Tao
Haixuan Xavier Tao
 GitHub
10 months ago
GitHub
10 months ago
No known key found for this signature in database
GPG Key ID: B5690EEEBB952194
100 changed files with 7654 additions and 0 deletions
Split View
Diff Options
-
+40 -0examples/alexk-lcr/ASSEMBLING.md
-
+90 -0examples/alexk-lcr/CONFIGURING.md
-
+82 -0examples/alexk-lcr/INSTALLATION.md
-
+174 -0examples/alexk-lcr/README.md
-
+80 -0examples/alexk-lcr/RECORDING.md
-
+135 -0examples/alexk-lcr/assets/simulation/lift_cube.xml
-
+135 -0examples/alexk-lcr/assets/simulation/pick_place_cube.xml
-
+137 -0examples/alexk-lcr/assets/simulation/push_cube.xml
-
+135 -0examples/alexk-lcr/assets/simulation/reach_cube.xml
-
+141 -0examples/alexk-lcr/assets/simulation/stack_two_cubes.xml
-
+328 -0examples/alexk-lcr/bus.py
-
+0 -0examples/alexk-lcr/configs/.gitkeep
-
+213 -0examples/alexk-lcr/configure.py
-
+74 -0examples/alexk-lcr/graphs/bi_teleop_real.yml
-
+40 -0examples/alexk-lcr/graphs/mono_replay_real.yml
-
+37 -0examples/alexk-lcr/graphs/mono_teleop_real.yml
-
+70 -0examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml
-
+43 -0examples/alexk-lcr/graphs/mono_teleop_simu.yml
-
+119 -0examples/alexk-lcr/graphs/record_mono_teleop_real.yml
-
+148 -0examples/alexk-lcr/nodes/interpolate_lcr_to_lcr.py
-
+114 -0examples/alexk-lcr/nodes/interpolate_lcr_to_record.py
-
+133 -0examples/alexk-lcr/nodes/interpolate_lcr_to_simu_lcr.py
-
+83 -0examples/alexk-lcr/nodes/interpolate_replay_to_lcr.py
-
+64 -0examples/aloha/ASSEMBLING.md
-
+95 -0examples/aloha/CONFIGURING.md
-
+87 -0examples/aloha/INSTALLATION.md
-
+42 -0examples/aloha/README.md
-
+17 -0examples/aloha/RECORDING.md
-
+13 -0examples/aloha/benchmark/python/README.md
-
+325 -0examples/aloha/benchmark/python/dynamixel.py
-
+191 -0examples/aloha/benchmark/python/robot.py
-
+24 -0examples/aloha/benchmark/python/teleoperate_real_robot.py
-
+103 -0examples/aloha/benchmark/ros2/README.md
-
+9 -0examples/aloha/benchmark/ros2/config/master_modes_left.yaml
-
+9 -0examples/aloha/benchmark/ros2/config/master_modes_right.yaml
-
+17 -0examples/aloha/benchmark/ros2/config/puppet_modes_left.yaml
-
+17 -0examples/aloha/benchmark/ros2/config/puppet_modes_right.yaml
-
+4 -0examples/aloha/benchmark/ros2/dataflow.yml
-
+22 -0examples/aloha/benchmark/ros2/setup_ros2.sh
-
+90 -0examples/aloha/benchmark/ros2/teleop.py
-
+9 -0examples/aloha/benchmark/rust/README.md
-
+141 -0examples/aloha/graphs/eval.yml
-
+38 -0examples/aloha/graphs/gym.yml
-
+162 -0examples/aloha/graphs/record_2arms_teleop.yml
-
+32 -0examples/aloha/graphs/record_teleop.yml
-
+61 -0examples/aloha/graphs/replay.yml
-
+4 -0examples/aloha/hardware_config/99-fixed-interbotix-udev.rules
-
+24 -0examples/aloha/hardware_config/99-interbotix-udev.rules
-
+13 -0examples/aloha/nodes/aloha-client/Cargo.toml
-
+104 -0examples/aloha/nodes/aloha-client/src/main.rs
-
+15 -0examples/aloha/nodes/aloha-teleop/Cargo.toml
-
+38 -0examples/aloha/nodes/aloha-teleop/src/_main.rs
-
+242 -0examples/aloha/nodes/aloha-teleop/src/main.rs
-
+66 -0examples/aloha/nodes/gym_dora_node.py
-
+31 -0examples/aloha/nodes/keyboard_node.py
-
+78 -0examples/aloha/nodes/lerobot_webcam_saver.py
-
+234 -0examples/aloha/nodes/llm_op.py
-
+53 -0examples/aloha/nodes/plot_node.py
-
+17 -0examples/aloha/nodes/policy.py
-
+28 -0examples/aloha/nodes/realsense_node.py
-
+27 -0examples/aloha/nodes/replay.py
-
+45 -0examples/aloha/nodes/webcam.py
-
+59 -0examples/aloha/nodes/whisper_node.py
-
+24 -0examples/aloha/tests/test_realsense.py
-
+63 -0examples/lebai/graphs/dataflow.yml
-
+128 -0examples/lebai/graphs/dataflow_full.yml
-
+88 -0examples/lebai/graphs/keyboard_teleop.yml
-
+115 -0examples/lebai/graphs/qwenvl2.yml
-
+1 -0examples/lebai/graphs/train.sh
-
+96 -0examples/lebai/graphs/voice_teleop.yml
-
+60 -0examples/lebai/nodes/interpolation.py
-
+49 -0examples/lebai/nodes/key_interpolation.py
-
+21 -0examples/lebai/nodes/prompt_interpolation.py
-
+1 -0examples/lebai/nodes/vlm_prompt.py
-
+22 -0examples/lebai/nodes/voice_interpolation.py
-
+103 -0examples/reachy/README.md
-
+86 -0examples/reachy/nodes/gym_dora_node.py
-
+31 -0examples/reachy/nodes/keyboard_node.py
-
+78 -0examples/reachy/nodes/lerobot_webcam_saver.py
-
+56 -0examples/reachy/nodes/plot_node.py
-
+156 -0examples/reachy/nodes/reachy_client.py
-
+73 -0examples/reachy/nodes/reachy_vision_client.py
-
+21 -0examples/reachy/nodes/replay_node.py
-
+103 -0examples/reachy1/README.md
-
+80 -0examples/reachy1/graphs/eval.yml
-
+74 -0examples/reachy1/graphs/qwenvl2.yml
-
+73 -0examples/reachy1/graphs/qwenvl2_recorder.yml
-
+86 -0examples/reachy1/nodes/gym_dora_node.py
-
+41 -0examples/reachy1/nodes/key_interpolation.py
-
+31 -0examples/reachy1/nodes/keyboard_node.py
-
+78 -0examples/reachy1/nodes/lerobot_webcam_saver.py
-
+56 -0examples/reachy1/nodes/plot_node.py
-
+156 -0examples/reachy1/nodes/reachy_client.py
-
+73 -0examples/reachy1/nodes/reachy_vision_client.py
-
+21 -0examples/reachy1/nodes/replay_node.py
-
+72 -0examples/reachy1/nodes/text_interpolation.py
-
+12 -0examples/so100/ASSEMBLING.md
-
+75 -0examples/so100/CONFIGURING.md
-
+82 -0examples/so100/INSTALLATION.md
-
+68 -0examples/so100/README.md
+ 40
- 0
examples/alexk-lcr/ASSEMBLING.md
View File
| @@ -0,0 +1,40 @@ | |||
| # Dora pipeline Robots | |||
| AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Assembling | |||
| **Please read the instructions carefully before buying or printing the parts.** | |||
| You will need to get the parts for a Follower arm and a Leader: | |||
| - [AlexK Follower Low Cost Robot](https://github.com/AlexanderKoch-Koch/low_cost_robot/?tab=readme-ov-file#follower-arm) | |||
| - [AlexK Leader Low Cost Robot](https://github.com/AlexanderKoch-Koch/low_cost_robot/?tab=readme-ov-file#follower-arm) | |||
| You **must** assemble the arm **with the extension** to be able to do some of the tasks. | |||
| You then need to print the Follower arm and the Leader arm. The STL files are: | |||
| - [AlexK Follower Low Cost Robot](https://github.com/AlexanderKoch-Koch/low_cost_robot/tree/main/hardware/follower/stl) | |||
| - [AlexK Leader Low Cost Robot](https://github.com/AlexanderKoch-Koch/low_cost_robot/tree/main/hardware/leader/stl) | |||
| Some parts **must** be replaced by the ones in this repository: | |||
| - [Dora-LeRobot Base Leader Low Cost Robot](assets/stl/LEADER_Base.stl) | |||
| If you struggle buying XL330 Frame or XL330/XL430 Idler Wheel, here are STL files that can be printed instead: | |||
| - [XL330 Frame](assets/stl/XL330_Frame.stl) | |||
| - [XL330 Idler Wheel](assets/stl/XL330_Idler_Wheel.stl) | |||
| - [XL430 Idler Wheel](assets/stl/XL430_Idler_Wheel.stl) | |||
| Please then follow the [YouTube Tutorial by Alexander Koch](https://youtu.be/RckrXOEoWrk?si=ZXDnnlF6BQd_o7v8) to | |||
| assemble the arm correctly. | |||
| Note that the tutorial is for the arm without the extension, so you will have to adapt the assembly. | |||
| Then you can place the two cameras on your desk, following this [image]() | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 90
- 0
examples/alexk-lcr/CONFIGURING.md
View File
| @@ -0,0 +1,90 @@ | |||
| # Dora pipeline Robots | |||
| AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Configuring | |||
| Once you have assembled the robot, and installed the required software, you can configure the robot. It's essential to | |||
| configure it | |||
| correctly for the robot to work as expected. Here are the reasons why you need to configure the robot: | |||
| - You may have done some 'mistakes' during the assembly, like inverting the motors, or changing the offsets by rotating | |||
| the motors before assembling the robot. So your configuration will be different from the one we used to record the | |||
| data set. | |||
| - The recording pipeline needs to know the position of the motors to record the data set correctly. If the motors are | |||
| calibrated differently, the data set will be incorrect. | |||
| **Please read the instructions carefully before configuring the robot.** | |||
| The first thing to do is to configure the Servo BUS: | |||
| - Setting all the servos to the same baud rate (1M). | |||
| - Setting the ID of the servos from the base (1) to the gripper (6) for the Follower and Leader arms. | |||
| Those steps can be done using the official wizard provided by the | |||
| manufacturer [ROBOTICS](https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/). | |||
| After that, you need to configure the homing offsets and drive mode to have the same behavior for every user. We | |||
| recommend using our on-board tool to set all of that automatically: | |||
| - Connect the Follower arm to your computer. | |||
| - Retrieve the device port from the official wizard. | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./examples/alexk-lcr/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
| **Note:** The configuration tool will disable all torque so you can move the arm freely to the Position 1. | |||
| **Note:** You will be asked to set the arm in two different positions. The two positions are: | |||
|  | |||
| **Node:** You will be asked the path of the configuration file, you can press enter to use the default one. | |||
| - Repeat the same steps for the Leader arm: | |||
| ```bash | |||
| python ./examples/alexk-lcr/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB1` to the device port you retrieved from the official wizard (like `COM4` on Windows). | |||
| **Note:** The configuration tool will disable all torque so you can move the arm freely to the Position 1. | |||
| **Node:** You will be asked the path of the configuration file, you can press enter to use the default one. | |||
| After following the guide, you should have the following configuration: | |||
|  | |||
| This configuration has to be exported into environment variables inside the graph file. Here is an example of the | |||
| configuration: | |||
| ```YAML | |||
| nodes: | |||
| - id: lcr-follower | |||
| env: | |||
| PORT: /dev/ttyUSB0 | |||
| CONFIG: ../configs/follower.left.json # relative path to `./examples/alexk-lcr/configs/follower.json` | |||
| - id: lcr-to-lcr | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| ``` | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 82
- 0
examples/alexk-lcr/INSTALLATION.md
View File
| @@ -0,0 +1,82 @@ | |||
| # Dora pipeline Robots | |||
| AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Installation | |||
| Dataflow-oriented robotic application (Dora) is a framework that makes creation of robotic applications fast and simple. | |||
| See [Dora repository](https://github.com/dora-rs/dora). | |||
| **Please read the instructions carefully before installing the required software and environment to run the robot.** | |||
| You must install Dora before attempting to run the AlexK Low Cost Robot pipeline. Here are the steps to install Dora: | |||
| - Install Rust by following the instructions at [Rustup](https://rustup.rs/). (You may need to install Visual Studio C++ | |||
| build tools on Windows.) | |||
| - Install Dora by running the following command: | |||
| ```bash | |||
| cargo install dora-cli | |||
| ``` | |||
| Now you're ready to run Rust dataflow applications! We decided to only make Python dataflow for AlexK Low Cost Robot, so | |||
| you may need to setup your Python environment: | |||
| - Install Python 3.12 or later by following the instructions at [Python](https://www.python.org/downloads/). | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| the command `whereis python3` on Linux, on default for Windows it's located | |||
| in `C:\Users\<User>\AppData\Local\Programs\Python\Python3.12\python.exe)`): | |||
| ```bash | |||
| path_to_your_python3_executable -m venv venv | |||
| ``` | |||
| - Activate the virtual environment and install the required Python packages by running the following command: | |||
| ```bash | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r examples/alexk-lcr/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r examples/alexk-lcr/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
| have to activate | |||
| your custom python environment before running `dora up && dora start [graph].yml`. | |||
| In order to record episodes, you need ffmpeg installed on your system. You can download it from | |||
| the [official website](https://ffmpeg.org/download.html). If you're on Windows, you can download the latest build | |||
| from [here](https://www.gyan.dev/ffmpeg/builds/). You can | |||
| extract the zip file and add the `bin` folder to your PATH. | |||
| If you're on Linux, you can install ffmpeg using the package manager of your distribution. ( | |||
| e.g `sudo apt install ffmpeg` on Ubuntu, `brew install ffmpeg` on macOS) | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 174
- 0
examples/alexk-lcr/README.md
View File
| @@ -0,0 +1,174 @@ | |||
| # Dora pipeline Robots | |||
| AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to record episodes for LeRobot. | |||
| ## Assembling | |||
| Check the [ASSEMBLING.md](ASSEMBLING.md) file for instructions on how to assemble the robot from scratch using the | |||
| provided parts from the [AlexK Low Cost Robot](https://github.com/AlexanderKoch-Koch/low_cost_robot) | |||
| ## Installation | |||
| Check the [INSTALLATION.md](INSTALLATION.md) file for instructions on how to install the required software and | |||
| environment | |||
| to run the robot. | |||
| ## Configuring | |||
| Check the [CONFIGURING.md](CONFIGURING.md) file for instructions on how to configure the robot to record episodes for | |||
| LeRobot and teleoperate the robot. | |||
| ## Recording | |||
| It's probably better to check the [examples](#examples) below before trying to record episodes. It will give you a | |||
| better | |||
| understanding of how Dora works. | |||
| Check the [RECORDING.md](RECORDING.md) file for instructions on how to record episodes for LeRobot. | |||
| ## Examples | |||
| There are also some other example applications in the `graphs` folder. Have fun! | |||
| Here is a list of the available examples: | |||
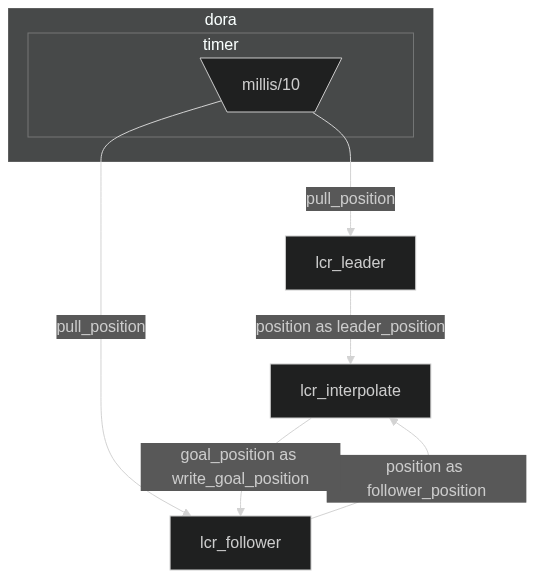
| - `mono_teleop_real.yml`: A simple real teleoperation pipeline that allows you to control a follower arm using a leader | |||
| arm. It | |||
| does not record the episodes, so you don't need to have a camera. | |||
| You must configure the arms, retrieve the device port, and modify the file `mono_teleop_real.yml` to set the correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`, `LEADER_CONTROL` and `FOLLOWER_CONTROL`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_real.yml | |||
| ``` | |||
| [](https://mermaid.live/edit#pako:eNqVUsFOxCAQ_RUy591Urz14MF496W0xZCzTlkihmUI2ZrP_LtDtutomRg4w83jvMcCcoPGaoAZxGa31x6ZHDuL1UTohbMPKEmriJTMuEI_eYqAFar1NskyZ4nvHOPZCKaU9Y1rEIQdvmXu7G8xAfJkzqUSFJUQWVAWoBmOtmar7u4OU17gqPHJaujJtK8R-L8ZorRr9ZILxLgEPGxdaqi_8hYqTWPC1fuMJZsvfFjP6p8H_qv9-7dWHZFHn8UaUijiyCaR-wmsv2EE6f0CjUzecsreE0NNAEuoUauQPCdKdEw9j8C-froE6cKQdsI9dD3WLdkpZHHWq5Mlg-urhipI2wfPz3Gyl585fka3hkA) | |||
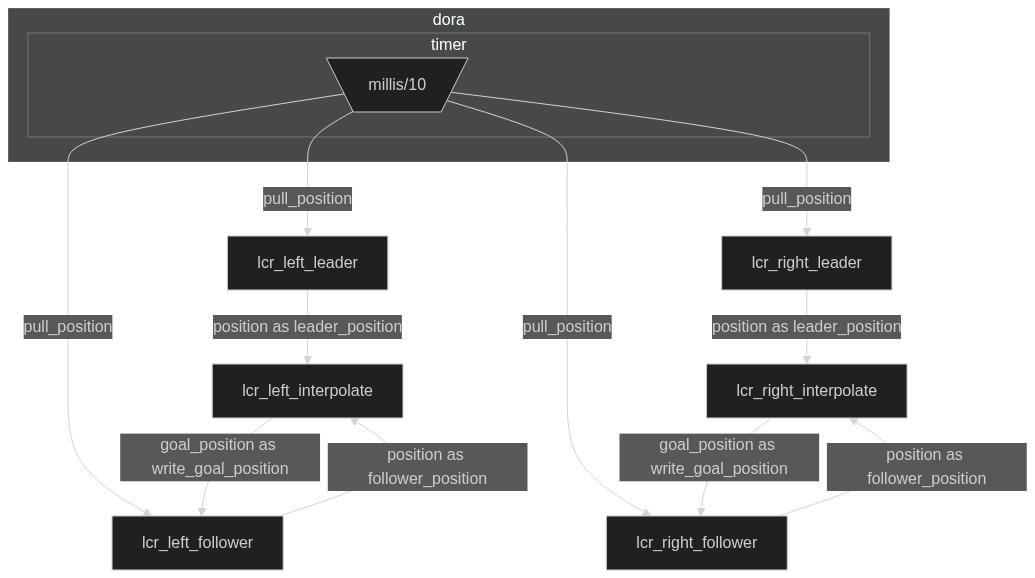
| - `bi_teleop_real.yml`: A simple real tele operation pipeline that allows you to control two follower arm using two | |||
| leader arm | |||
| (left and right). It does not record the episodes, so you don't need to have a camera. | |||
| You must configure the arms, retrieve the device port, and modify the file `bi_teleop_real.yml` to set the correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/bi_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/bi_teleop_real.yml | |||
| ``` | |||
| [](https://mermaid.live/edit#pako:eNqlVMFugzAM_ZUo51ZsVw47TLvutN2aKsqIgWghQSZRNVX99yWhtAXBNjoOxrz4vdgmzpEWVgLNKTk_pbaHohboyPszM4ToArmG0gUjJOAIUsYBtlYLByO8tDqoXINRVfVUoMdmFPqFq0TnPyoUbU0459KiCC-yi84-Mm5XnWoAzzYGJS9FERIJWQKyRmmtuuzxYcfYxc9SHBjJTDLzDLLdktZrzVvbKaesCcDTjy0a6kjMgSQ6MuALSkud7XeYivXo36TuKGv6O6eykV5ZcUMPOR1QOeBjeFF1XVLLx2l9t385huv6PSt2T23zA_Sflk916YaGjBqhZJj9Y9yHUVdDA4zmwZUCPxll5hTihHf27csUNHfoYUPR-qqmeSl0F758K0M-L0qEMWwuKEjlLL72V0u6YU7fOOqbHg) | |||
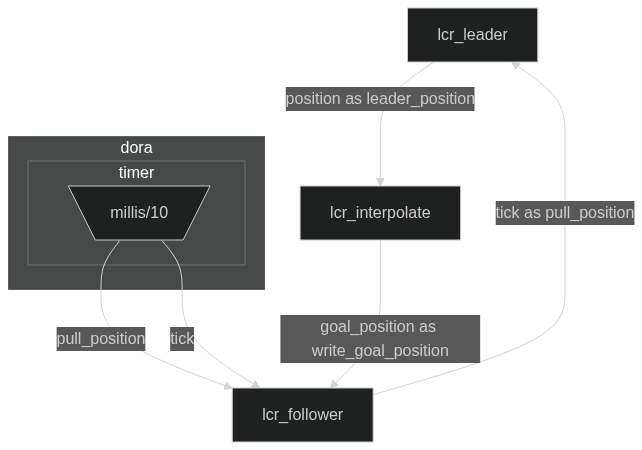
| - `mono_teleop_simu.yml`: A simple simulation tele operation pipeline that allows you to control a simulated follower | |||
| arm using a leader arm. It does not record the episodes, so you don't need to have a camera. | |||
| You must configure the arms, retrieve the device port, and modify the file `mono_teleop_simu.yml` to set the correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_simu.yml | |||
| ``` | |||
| [](https://mermaid.live/edit#pako:eNp1UstuwyAQ_JUV50Rurz70UPXaU3sLFdqatY2CwcKgqIry711w4ubhcoDdYWZ3eBxF4zWJWsB5tNYfmh5DhM9X6QBsE5Ql1BQumXGRwugtRrpArbcsy5QpfXcBxx6UUtoH5AV2OfjK3OvdaAYK5zmTSlRYAFlQFaAajLVmqp6fdlIucVV45LR0Zbp1AdstRNPsAScYk7Vq9JOJxjveeFk50Jxl1UJk5Yw-au-Ov2a1lFpt_HdR_yuL9TXBXffM7TxedWHXh2AiqVv4sZbYCG47oNH88sdcW4rY00BS1BxqDHsppDsxD1P0Hz-uEXUMiTYi-NT1om7RTpylUbOTN4P8rMOCkjbRh_f5Y5X_dfoF5ZjY9g) | |||
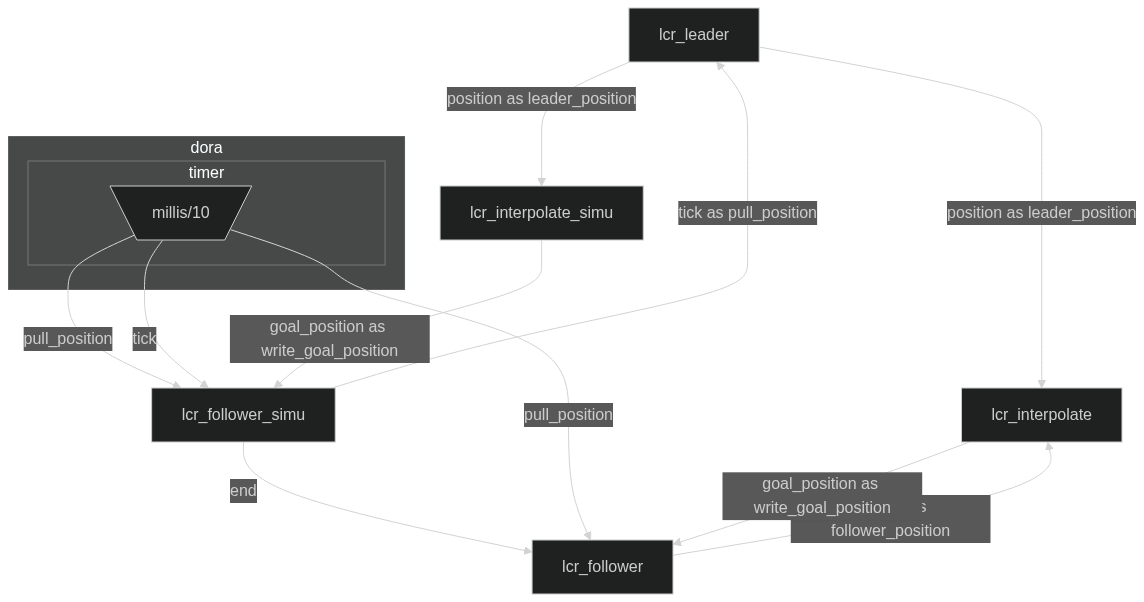
| - `mono_teleop_real_and_simu.yml`: A simple real and simulation tele operation pipeline that allows you to control a | |||
| simulated and real follower arm using a real leader arm. It does not record the episodes, so you don't need to have a | |||
| camera. | |||
| You must configure the arms, retrieve the device port, and modify the file `mono_teleop_real_and_simu.yml` to set the | |||
| correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml | |||
| ``` | |||
| [](https://mermaid.live/edit#pako:eNqdU8luwyAQ_RXEOZHbqw89VL321N5ChajBMQqLxaKoivLvHXCM3IS0lX3Aw-O9YRbmhDvLBW4xuny9ssduYC6g92diEFKdo0owLty8kyYIN1rFgpih3iqQVSnUSx2veRfQx8-9Y-OAKKXcOgY_tEvGRxIsT4PUoJrWRMpWZiGUBE0GGi2Vkr55fNgRUuwm84ThxOSlEgrablGQ3QExj8aoFB2tl0FaAwdPlRLM4qQrVNAWpzf6StEml9cuJvRfDm5SgPQKf9mSWoXyvdVUf2lmEu0tW4gg4qOT0Oaf8D1fq3Muz2hdLn_Kc_fvqmrBrK5FVuMNhhg0kxxm75TuIDgMQguCWzA5cweCiTkDj8Vg375Mh9vgothgZ-N-wG3PlIddHDlE9CIZzIouqOAyWPc6jXae8PM3I_doSQ) | |||
| - `mono_replay_real.yml`: A simple real replay pipeline that allows you to replay a recorded episode. | |||
| You must configure the dataset path and episode index in the file `mono_replay_real.yml` to set the correct | |||
| environment variables. (e.g. `PATH`, `EPISODE`). You must also configure the follower arm, retrieve the device port, and | |||
| modify the file `mono_replay_real.yml` to set the correct environment variables. (e.g. `PORT` and `CONFIG`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/mono_replay_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/mono_replay_real.yml | |||
| ``` | |||
| [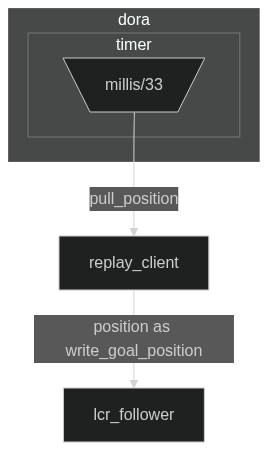](https://mermaid.live/edit#pako:eNptkbFuAyEMhl_F8pzohmw3dKiydmq3UCH38N2hcoB8oCiK8u4BmkZNWwbz8_PZCPuMQzCMPcJtjS4ch5kkwduz8gDC0dFJD86yT9Vwg-gxuIKxKL_mj0kozqC1NkGobHCo4r2yP2-TXVhusUJNNQqgJnTN6BbrnF273e6g1F13jWNvlG_h_wzYbiFm53QMq002-GI8_f3Ag9FyvnFa4Sg2sZ4C_ary-GvcYHl5IWtK5861qMI088IK-yINyadC5S-Fo5zC68kP2CfJvEEJeZqxH8mt5ZSjocR7S6VNy91lY1OQl6_BtPlcrmjBlKg) | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 80
- 0
examples/alexk-lcr/RECORDING.md
View File
| @@ -0,0 +1,80 @@ | |||
| # Dora pipeline Robots | |||
| AlexK Low Cost Robot is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Recording | |||
| This section explains how to record episodes for LeRobot using the AlexK Low Cost Robot. | |||
| Recording is the process of tele operating the robot and saving the episodes to a dataset. The dataset is used to train | |||
| the robot to perform tasks autonomously. | |||
| To record episodes with Dora, you have to configure the Dataflow `record_mono_teleop_real.yml` file to integrate the | |||
| arms and the camera. The graph file is located in the `graphs` folder. | |||
| Make sure to: | |||
| - Adjust the serial ports of `lcr-leader` and `lcr-follower` in the `record_mono_teleop_real.yml` file. | |||
| - Adjust the camera PATH in the `record_mono_teleop_real.yml` file. | |||
| - Adjust image and video WIDTH and HEIGHT in the `record_mono_teleop_real.yml` file, if needed. | |||
| - Adjust recording framerate with your camera framerate in the `record_mono_teleop_real.yml` file. | |||
| - Adjust CONFIG path environment variables in the `record_mono_teleop_real.yml` file for both arms if needed. | |||
| - Adjust `LEADER_CONTROL` and `FOLLOWER_CONTROL` environment variables in the `record_mono_teleop_real.yml` file if | |||
| needed. | |||
| You can now start the Dora pipeline to record episodes for LeRobot: | |||
| ```bash | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/alexk-lcr/graphs/record_mono_teleop_real.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/alexk-lcr/graphs/record_mono_teleop_real.yml | |||
| ``` | |||
| Then, you can tele operate the follower with the leader. A window will pop up showing the camera feed, and some text. | |||
| 1. Press space to start/stop recording | |||
| 2. Press return if you want to tell the recording that you failed the current episode, or the previous episode if you | |||
| have not started the current one | |||
| 3. Close the window to stop the recording | |||
| 4. Write down the location of the logs (e.g `018fc3a8-3b76-70f5-84a2-22b84df24739`), this is where the | |||
| dataset (and logs) are stored. | |||
| You can now use our script to convert the logs to an understandable dataset: | |||
| ```bash | |||
| cd dora | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./datasets/build_dataset.py --record-path [path_to_recorded_logs] --dataset-name [dataset_name] --framerate [framerate] | |||
| ``` | |||
| **Note:** On default, the framerate is 30. If you have recorded with a different framerate, you will have to adjust it. | |||
| ## The dora graph | |||
| [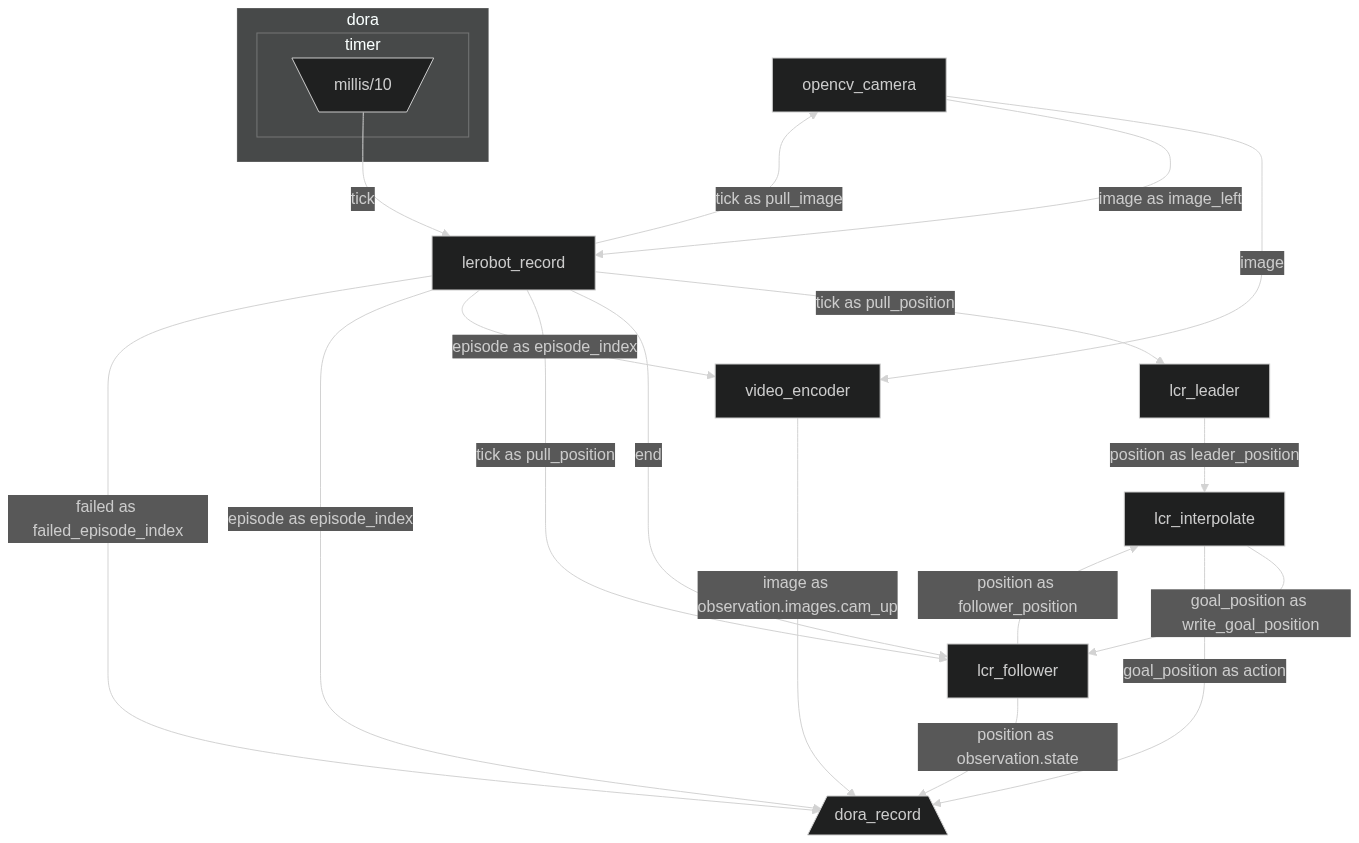](https://mermaid.live/edit#pako:eNqdVMFu2zAM_RVB57berjn0MOzaU3eLCoGR6ESobBqSnK4o-u-j5NizE6Np64NBPfE9Us-03qQhi3IjxempPb2YA4Qk_vxSrRDeBO0RLIZx5dqEoSMPCUeoJs-0IYU6bM1RG2gwQAaOziJpBmkUwUA7SjqgoWAzYinAabmtZgulnlQb-90-QHcQWuuyp7XY5uApU-e7yXHN0zsnlahkDSWqAlSN897F6uePrVJTXJU8bLmf8jpvU9zeiuTMs4Aout573VF0yVHLG_crLo2WZN6UytwRv-Sv-DpInksM6HWBi_75YFPy_JN99aQL7rJwJu8JZiRWeQkuoV7C3-jDNbDHQryYsZWzdi7ywGXyKeQ2Lf4t_IuRXAhm-v9an83lQiXgj1an4Xirc34-hNMx1ymf8RfMZOn85_m6L1fZNTiPtsxxifRVjYV9C7doFzEcIbd-V8B4x57qvltt5YNfai4U02DSQkDeSLa8AWf5onvLckqmAzao5IZDC-FZSdW-cx70iR5fWyM3KfR4IwP1-4Pc1OAjr_rOsvxvB3zlNBOK1iUKD8M9Wq7T93-SiOfx) | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 135
- 0
examples/alexk-lcr/assets/simulation/lift_cube.xml
View File
| @@ -0,0 +1,135 @@ | |||
| <mujoco model="bd1 scene"> | |||
| <option timestep="0.005"/> | |||
| <compiler angle="radian" autolimits="true"/> | |||
| <asset> | |||
| <mesh name="base" file="base.stl"/> | |||
| <mesh name="dc11_a01_spacer_dummy" file="dc11_a01_spacer_dummy.stl"/> | |||
| <mesh name="dc11_a01_dummy" file="dc11_a01_dummy.stl"/> | |||
| <mesh name="rotation_connector" file="rotation_connector.stl"/> | |||
| <mesh name="arm_connector" file="arm_connector.stl"/> | |||
| <mesh name="dc15_a01_horn_idle2_dummy" file="dc15_a01_horn_idle2_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_m_dummy" file="dc15_a01_case_m_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_f_dummy" file="dc15_a01_case_f_dummy.stl"/> | |||
| <mesh name="dc15_a01_horn_dummy" file="dc15_a01_horn_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_b_dummy" file="dc15_a01_case_b_dummy.stl"/> | |||
| <mesh name="connector" file="connector.stl"/> | |||
| <mesh name="shoulder_rotation" file="shoulder_rotation.stl"/> | |||
| <mesh name="static_side" file="static_side.stl"/> | |||
| <mesh name="moving_side" file="moving_side.stl"/> | |||
| <texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072" /> | |||
| <texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3" markrgb="0.8 0.8 0.8" width="300" height="300" /> | |||
| <material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2" /> | |||
| </asset> | |||
| <visual> | |||
| <headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0" /> | |||
| <rgba haze="0.15 0.25 0.35 1" /> | |||
| <global azimuth="150" elevation="-20" offheight="640" /> | |||
| </visual> | |||
| <worldbody> | |||
| <light pos="0 0 3" dir="0 0 -1" directional="false" /> | |||
| <body name="floor"> | |||
| <geom pos="0 0 0" name="floor" size="0 0 .125" type="plane" material="groundplane" conaffinity="1" contype="1" /> | |||
| </body> | |||
| <body name="cube" pos="0.1 0.1 0.01"> | |||
| <freejoint name="cube"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube" rgba="0.5 0 0 1" priority="1"/> | |||
| </body> | |||
| <camera name="camera_front" pos="0.049 0.888 0.317" xyaxes="-0.998 0.056 -0.000 -0.019 -0.335 0.942"/> | |||
| <camera name="camera_top" pos="0 0 1" euler="0 0 0" mode="fixed"/> | |||
| <camera name="camera_vizu" pos="-0.1 0.6 0.3" quat="-0.15 -0.1 0.6 1"/> | |||
| <geom pos="0.0401555 -0.0353754 -0.0242427" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="base"/> | |||
| <geom pos="0.0511555 0.0406246 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 -0.0184427" quat="0 0 1 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0401555 0.0326246 -0.0042427" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 -0.0184427" quat="0 0.707107 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 0.0099573" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.0406246 -0.0184427" quat="0 0.707107 -0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 -0.0184427" quat="0 -1 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 0.0099573" quat="0.707107 0 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch1_assembly" pos="0.0401555 0.0326246 0.0166573"> | |||
| <inertial pos="-0.000767103 -0.0121505 0.0134241" quat="0.498429 0.53272 -0.473938 0.493113" mass="0.0606831" diaginertia="1.86261e-05 1.72746e-05 1.11693e-05"/> | |||
| <joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" range="-3.14159 3.14159" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 -0.0209" type="mesh" rgba="0.231373 0.380392 0.705882 1" mesh="rotation_connector"/> | |||
| <geom pos="-0.014 0.008 0.0264" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0044" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0264" quat="0.707107 0 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0002 0 0.0154" quat="0.707107 0 -0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0044" quat="0.5 0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 0.008 0.0044" quat="0.5 0.5 -0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0264" quat="0.5 -0.5 0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0044" quat="0 0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0264" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch2_assembly" pos="-0.0188 0 0.0154" quat="0 0.707107 0 0.707107"> | |||
| <inertial pos="0.0766242 -0.00031229 0.0187402" quat="0.52596 0.513053 0.489778 0.469319" mass="0.0432446" diaginertia="7.21796e-05 7.03107e-05 1.07533e-05"/> | |||
| <joint name="shoulder_lift_joint" pos="0 0 0" axis="0 0 1" range="-1.5708 1.22173" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 0.019" quat="0.5 -0.5 -0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="arm_connector"/> | |||
| <geom pos="0.1083 -0.0148 0.03035" quat="1 0 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.00715" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.03025" quat="0 -1 0 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="pitch3_assembly" pos="0.1083 -0.0148 0.00425" quat="0.707107 0 0 0.707107"> | |||
| <inertial pos="-0.0551014 -0.00287792 0.0144813" quat="0.500323 0.499209 0.499868 0.5006" mass="0.0788335" diaginertia="6.80912e-05 6.45748e-05 9.84479e-06"/> | |||
| <joint name="elbow_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.48353 1.74533" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00863031 0.00847376 0.0145" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="connector"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02635" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00315" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02625" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="effector_roll_assembly" pos="-0.100476 -0.00269986 0.02925" quat="0 -0.707107 -0.707107 0"> | |||
| <inertial pos="-1.65017e-05 -0.02659 0.0195388" quat="0.936813 0.349829 -0.00055331 -0.000300569" mass="0.0240506" diaginertia="6.03208e-06 4.12894e-06 3.3522e-06"/> | |||
| <joint name="wrist_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.91986 1.91986" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.0109998 -0.0190002 0.039" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="shoulder_rotation"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0421002 0.0133967" quat="0 1 0 0" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0190002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="gripper_assembly" pos="-7.44154e-06 -0.0450002 0.0133967" quat="0.5 -0.5 -0.5 -0.5"> | |||
| <inertial pos="-0.00548595 -0.000433143 -0.0190793" quat="0.700194 0.164851 0.167361 0.674197" mass="0.0360627" diaginertia="1.3261e-05 1.231e-05 5.3532e-06"/> | |||
| <joint name="wrist_roll_joint" pos="0 0 0" axis="0 0 1" range="-2.96706 2.96706" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00075 -0.01475 -0.02" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.917647 0.917647 0.917647 1" mesh="static_side"/> | |||
| <geom pos="0.00755 0.01135 -0.013" quat="0.5 -0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.00755 -0.01185 -0.013" quat="0 -0.707107 0 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.00755 0.01125 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="moving_side" pos="0.00755 -0.01475 -0.013" quat="0.707107 -0.707107 0 0"> | |||
| <inertial pos="-0.000395599 0.022415 0.0145636" quat="0.722353 0.689129 0.0389102 0.0423547" mass="0.0089856" diaginertia="3.28451e-06 2.24898e-06 1.41539e-06"/> | |||
| <joint name="gripper_joint" pos="0 0 0" axis="0 0 1" range="-1.74533 0.0523599" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00838199 -0.000256591 -0.003" type="mesh" rgba="0.768627 0.886275 0.952941 1" mesh="moving_side"/> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </worldbody> | |||
| <actuator> | |||
| <position joint="shoulder_pan_joint" ctrlrange="-3.14159 3.14159" ctrllimited="true" kp="20" /> | |||
| <position joint="shoulder_lift_joint" ctrlrange="-1.5708 1.22173" ctrllimited="true" kp="20" /> | |||
| <position joint="elbow_flex_joint" ctrlrange="-1.48353 1.74533" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_flex_joint" ctrlrange="-1.91986 1.91986" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_roll_joint" ctrlrange="-2.96706 2.96706" ctrllimited="true" kp="20" /> | |||
| <position joint="gripper_joint" ctrlrange="-1.74533 0.0523599" ctrllimited="true" kp="20" /> | |||
| </actuator> | |||
| </mujoco> | |||
+ 135
- 0
examples/alexk-lcr/assets/simulation/pick_place_cube.xml
View File
| @@ -0,0 +1,135 @@ | |||
| <mujoco model="bd1 scene"> | |||
| <option timestep="0.005"/> | |||
| <compiler angle="radian" autolimits="true"/> | |||
| <asset> | |||
| <mesh name="base" file="base.stl"/> | |||
| <mesh name="dc11_a01_spacer_dummy" file="dc11_a01_spacer_dummy.stl"/> | |||
| <mesh name="dc11_a01_dummy" file="dc11_a01_dummy.stl"/> | |||
| <mesh name="rotation_connector" file="rotation_connector.stl"/> | |||
| <mesh name="arm_connector" file="arm_connector.stl"/> | |||
| <mesh name="dc15_a01_horn_idle2_dummy" file="dc15_a01_horn_idle2_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_m_dummy" file="dc15_a01_case_m_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_f_dummy" file="dc15_a01_case_f_dummy.stl"/> | |||
| <mesh name="dc15_a01_horn_dummy" file="dc15_a01_horn_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_b_dummy" file="dc15_a01_case_b_dummy.stl"/> | |||
| <mesh name="connector" file="connector.stl"/> | |||
| <mesh name="shoulder_rotation" file="shoulder_rotation.stl"/> | |||
| <mesh name="static_side" file="static_side.stl"/> | |||
| <mesh name="moving_side" file="moving_side.stl"/> | |||
| <texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072" /> | |||
| <texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3" markrgb="0.8 0.8 0.8" width="300" height="300" /> | |||
| <material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2" /> | |||
| </asset> | |||
| <visual> | |||
| <headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0" /> | |||
| <rgba haze="0.15 0.25 0.35 1" /> | |||
| <global azimuth="150" elevation="-20" offheight="640" /> | |||
| </visual> | |||
| <worldbody> | |||
| <light pos="0 0 3" dir="0 0 -1" directional="false" /> | |||
| <body name="floor"> | |||
| <geom pos="0 0 0" name="floor" size="0 0 .125" type="plane" material="groundplane" conaffinity="1" contype="1" /> | |||
| </body> | |||
| <body name="cube" pos="0.1 0.1 0.01"> | |||
| <freejoint name="cube"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube" rgba="0.5 0 0 1" priority="1"/> | |||
| </body> | |||
| <camera name="camera_front" pos="0.049 0.888 0.317" xyaxes="-0.998 0.056 -0.000 -0.019 -0.335 0.942"/> | |||
| <camera name="camera_top" pos="0 0 1" euler="0 0 0" mode="fixed"/> | |||
| <camera name="camera_vizu" pos="-0.1 0.6 0.3" quat="-0.15 -0.1 0.6 1"/> | |||
| <geom pos="0.0401555 -0.0353754 -0.0242427" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="base"/> | |||
| <geom pos="0.0511555 0.0406246 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 -0.0184427" quat="0 0 1 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0401555 0.0326246 -0.0042427" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 -0.0184427" quat="0 0.707107 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 0.0099573" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.0406246 -0.0184427" quat="0 0.707107 -0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 -0.0184427" quat="0 -1 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 0.0099573" quat="0.707107 0 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch1_assembly" pos="0.0401555 0.0326246 0.0166573"> | |||
| <inertial pos="-0.000767103 -0.0121505 0.0134241" quat="0.498429 0.53272 -0.473938 0.493113" mass="0.0606831" diaginertia="1.86261e-05 1.72746e-05 1.11693e-05"/> | |||
| <joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" range="-3.14159 3.14159" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 -0.0209" type="mesh" rgba="0.231373 0.380392 0.705882 1" mesh="rotation_connector"/> | |||
| <geom pos="-0.014 0.008 0.0264" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0044" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0264" quat="0.707107 0 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0002 0 0.0154" quat="0.707107 0 -0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0044" quat="0.5 0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 0.008 0.0044" quat="0.5 0.5 -0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0264" quat="0.5 -0.5 0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0044" quat="0 0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0264" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch2_assembly" pos="-0.0188 0 0.0154" quat="0 0.707107 0 0.707107"> | |||
| <inertial pos="0.0766242 -0.00031229 0.0187402" quat="0.52596 0.513053 0.489778 0.469319" mass="0.0432446" diaginertia="7.21796e-05 7.03107e-05 1.07533e-05"/> | |||
| <joint name="shoulder_lift_joint" pos="0 0 0" axis="0 0 1" range="-1.5708 1.22173" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 0.019" quat="0.5 -0.5 -0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="arm_connector"/> | |||
| <geom pos="0.1083 -0.0148 0.03035" quat="1 0 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.00715" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.03025" quat="0 -1 0 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="pitch3_assembly" pos="0.1083 -0.0148 0.00425" quat="0.707107 0 0 0.707107"> | |||
| <inertial pos="-0.0551014 -0.00287792 0.0144813" quat="0.500323 0.499209 0.499868 0.5006" mass="0.0788335" diaginertia="6.80912e-05 6.45748e-05 9.84479e-06"/> | |||
| <joint name="elbow_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.48353 1.74533" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00863031 0.00847376 0.0145" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="connector"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02635" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00315" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02625" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="effector_roll_assembly" pos="-0.100476 -0.00269986 0.02925" quat="0 -0.707107 -0.707107 0"> | |||
| <inertial pos="-1.65017e-05 -0.02659 0.0195388" quat="0.936813 0.349829 -0.00055331 -0.000300569" mass="0.0240506" diaginertia="6.03208e-06 4.12894e-06 3.3522e-06"/> | |||
| <joint name="wrist_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.91986 1.91986" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.0109998 -0.0190002 0.039" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="shoulder_rotation"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0421002 0.0133967" quat="0 1 0 0" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0190002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="gripper_assembly" pos="-7.44154e-06 -0.0450002 0.0133967" quat="0.5 -0.5 -0.5 -0.5"> | |||
| <inertial pos="-0.00548595 -0.000433143 -0.0190793" quat="0.700194 0.164851 0.167361 0.674197" mass="0.0360627" diaginertia="1.3261e-05 1.231e-05 5.3532e-06"/> | |||
| <joint name="wrist_roll_joint" pos="0 0 0" axis="0 0 1" range="-2.96706 2.96706" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00075 -0.01475 -0.02" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.917647 0.917647 0.917647 1" mesh="static_side"/> | |||
| <geom pos="0.00755 0.01135 -0.013" quat="0.5 -0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.00755 -0.01185 -0.013" quat="0 -0.707107 0 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.00755 0.01125 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="moving_side" pos="0.00755 -0.01475 -0.013" quat="0.707107 -0.707107 0 0"> | |||
| <inertial pos="-0.000395599 0.022415 0.0145636" quat="0.722353 0.689129 0.0389102 0.0423547" mass="0.0089856" diaginertia="3.28451e-06 2.24898e-06 1.41539e-06"/> | |||
| <joint name="gripper_joint" pos="0 0 0" axis="0 0 1" range="-1.74533 0.0523599" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00838199 -0.000256591 -0.003" type="mesh" rgba="0.768627 0.886275 0.952941 1" mesh="moving_side"/> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </worldbody> | |||
| <actuator> | |||
| <position joint="shoulder_pan_joint" ctrlrange="-3.14159 3.14159" ctrllimited="true" kp="20" /> | |||
| <position joint="shoulder_lift_joint" ctrlrange="-1.5708 1.22173" ctrllimited="true" kp="20" /> | |||
| <position joint="elbow_flex_joint" ctrlrange="-1.48353 1.74533" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_flex_joint" ctrlrange="-1.91986 1.91986" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_roll_joint" ctrlrange="-2.96706 2.96706" ctrllimited="true" kp="20" /> | |||
| <position joint="gripper_joint" ctrlrange="-1.74533 0.0523599" ctrllimited="true" kp="20" /> | |||
| </actuator> | |||
| </mujoco> | |||
+ 137
- 0
examples/alexk-lcr/assets/simulation/push_cube.xml
View File
| @@ -0,0 +1,137 @@ | |||
| <mujoco model="bd1 scene"> | |||
| <option timestep="0.005"/> | |||
| <compiler angle="radian" autolimits="true"/> | |||
| <asset> | |||
| <mesh name="base" file="base.stl"/> | |||
| <mesh name="dc11_a01_spacer_dummy" file="dc11_a01_spacer_dummy.stl"/> | |||
| <mesh name="dc11_a01_dummy" file="dc11_a01_dummy.stl"/> | |||
| <mesh name="rotation_connector" file="rotation_connector.stl"/> | |||
| <mesh name="arm_connector" file="arm_connector.stl"/> | |||
| <mesh name="dc15_a01_horn_idle2_dummy" file="dc15_a01_horn_idle2_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_m_dummy" file="dc15_a01_case_m_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_f_dummy" file="dc15_a01_case_f_dummy.stl"/> | |||
| <mesh name="dc15_a01_horn_dummy" file="dc15_a01_horn_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_b_dummy" file="dc15_a01_case_b_dummy.stl"/> | |||
| <mesh name="connector" file="connector.stl"/> | |||
| <mesh name="shoulder_rotation" file="shoulder_rotation.stl"/> | |||
| <mesh name="static_side" file="static_side.stl"/> | |||
| <mesh name="moving_side" file="moving_side.stl"/> | |||
| <texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072" /> | |||
| <texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3" markrgb="0.8 0.8 0.8" width="300" height="300" /> | |||
| <material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2" /> | |||
| </asset> | |||
| <visual> | |||
| <headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0" /> | |||
| <rgba haze="0.15 0.25 0.35 1" /> | |||
| <global azimuth="150" elevation="-20" offheight="640" /> | |||
| </visual> | |||
| <worldbody> | |||
| <light pos="0 0 3" dir="0 0 -1" directional="false" /> | |||
| <body name="floor"> | |||
| <geom pos="0 0 0" name="floor" size="0 0 .125" type="plane" material="groundplane" conaffinity="1" contype="1" /> | |||
| </body> | |||
| <body name="cube" pos="0.1 0.1 0.01"> | |||
| <freejoint name="cube"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube" rgba="0.5 0 0 1" priority="1"/> | |||
| </body> | |||
| <camera name="camera_front" pos="0.049 0.888 0.317" xyaxes="-0.998 0.056 -0.000 -0.019 -0.335 0.942"/> | |||
| <camera name="camera_top" pos="0 0 1" euler="0 0 0" mode="fixed"/> | |||
| <camera name="camera_vizu" pos="-0.1 0.6 0.3" quat="-0.15 -0.1 0.6 1"/> | |||
| <geom pos="0.0401555 -0.0353754 -0.0242427" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="base"/> | |||
| <geom pos="0.0511555 0.0406246 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 -0.0184427" quat="0 0 1 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0401555 0.0326246 -0.0042427" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 -0.0184427" quat="0 0.707107 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 0.0099573" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.0406246 -0.0184427" quat="0 0.707107 -0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 -0.0184427" quat="0 -1 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 0.0099573" quat="0.707107 0 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch1_assembly" pos="0.0401555 0.0326246 0.0166573"> | |||
| <inertial pos="-0.000767103 -0.0121505 0.0134241" quat="0.498429 0.53272 -0.473938 0.493113" mass="0.0606831" diaginertia="1.86261e-05 1.72746e-05 1.11693e-05"/> | |||
| <joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" range="-3.14159 3.14159" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 -0.0209" type="mesh" rgba="0.231373 0.380392 0.705882 1" mesh="rotation_connector"/> | |||
| <geom pos="-0.014 0.008 0.0264" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0044" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0264" quat="0.707107 0 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0002 0 0.0154" quat="0.707107 0 -0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0044" quat="0.5 0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 0.008 0.0044" quat="0.5 0.5 -0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0264" quat="0.5 -0.5 0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0044" quat="0 0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0264" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch2_assembly" pos="-0.0188 0 0.0154" quat="0 0.707107 0 0.707107"> | |||
| <inertial pos="0.0766242 -0.00031229 0.0187402" quat="0.52596 0.513053 0.489778 0.469319" mass="0.0432446" diaginertia="7.21796e-05 7.03107e-05 1.07533e-05"/> | |||
| <joint name="shoulder_lift_joint" pos="0 0 0" axis="0 0 1" range="-1.5708 1.22173" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 0.019" quat="0.5 -0.5 -0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="arm_connector"/> | |||
| <geom pos="0.1083 -0.0148 0.03035" quat="1 0 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.00715" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.03025" quat="0 -1 0 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="pitch3_assembly" pos="0.1083 -0.0148 0.00425" quat="0.707107 0 0 0.707107"> | |||
| <inertial pos="-0.0551014 -0.00287792 0.0144813" quat="0.500323 0.499209 0.499868 0.5006" mass="0.0788335" diaginertia="6.80912e-05 6.45748e-05 9.84479e-06"/> | |||
| <joint name="elbow_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.48353 1.74533" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00863031 0.00847376 0.0145" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="connector"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02635" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00315" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02625" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="effector_roll_assembly" pos="-0.100476 -0.00269986 0.02925" quat="0 -0.707107 -0.707107 0"> | |||
| <inertial pos="-1.65017e-05 -0.02659 0.0195388" quat="0.936813 0.349829 -0.00055331 -0.000300569" mass="0.0240506" diaginertia="6.03208e-06 4.12894e-06 3.3522e-06"/> | |||
| <joint name="wrist_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.91986 1.91986" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.0109998 -0.0190002 0.039" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="shoulder_rotation"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0421002 0.0133967" quat="0 1 0 0" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0190002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="gripper_assembly" pos="-7.44154e-06 -0.0450002 0.0133967" quat="0.5 -0.5 -0.5 -0.5"> | |||
| <inertial pos="-0.00548595 -0.000433143 -0.0190793" quat="0.700194 0.164851 0.167361 0.674197" mass="0.0360627" diaginertia="1.3261e-05 1.231e-05 5.3532e-06"/> | |||
| <joint name="wrist_roll_joint" pos="0 0 0" axis="0 0 1" range="-2.96706 2.96706" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00075 -0.01475 -0.02" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.917647 0.917647 0.917647 1" mesh="static_side"/> | |||
| <geom pos="0.00755 0.01135 -0.013" quat="0.5 -0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.00755 -0.01185 -0.013" quat="0 -0.707107 0 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.00755 0.01125 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="moving_side" pos="0.00755 -0.01475 -0.013" quat="0.707107 -0.707107 0 0"> | |||
| <inertial pos="-0.000395599 0.022415 0.0145636" quat="0.722353 0.689129 0.0389102 0.0423547" mass="0.0089856" diaginertia="3.28451e-06 2.24898e-06 1.41539e-06"/> | |||
| <joint name="gripper_joint" pos="0 0 0" axis="0 0 1" range="-1.74533 0.0523599" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00838199 -0.000256591 -0.003" type="mesh" rgba="0.768627 0.886275 0.952941 1" mesh="moving_side"/> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| <site name="cube_target" pos="1 0 0" size="0.01" rgba="1 0 0 1" /> | |||
| </worldbody> | |||
| <actuator> | |||
| <position joint="shoulder_pan_joint" ctrlrange="-3.14159 3.14159" ctrllimited="true" kp="20" /> | |||
| <position joint="shoulder_lift_joint" ctrlrange="-1.5708 1.22173" ctrllimited="true" kp="20" /> | |||
| <position joint="elbow_flex_joint" ctrlrange="-1.48353 1.74533" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_flex_joint" ctrlrange="-1.91986 1.91986" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_roll_joint" ctrlrange="-2.96706 2.96706" ctrllimited="true" kp="20" /> | |||
| <position joint="gripper_joint" ctrlrange="-1.74533 0.0523599" ctrllimited="true" kp="20" /> | |||
| </actuator> | |||
| </mujoco> | |||
+ 135
- 0
examples/alexk-lcr/assets/simulation/reach_cube.xml
View File
| @@ -0,0 +1,135 @@ | |||
| <mujoco model="bd1 scene"> | |||
| <option timestep="0.005"/> | |||
| <compiler angle="radian" autolimits="true"/> | |||
| <asset> | |||
| <mesh name="base" file="base.stl"/> | |||
| <mesh name="dc11_a01_spacer_dummy" file="dc11_a01_spacer_dummy.stl"/> | |||
| <mesh name="dc11_a01_dummy" file="dc11_a01_dummy.stl"/> | |||
| <mesh name="rotation_connector" file="rotation_connector.stl"/> | |||
| <mesh name="arm_connector" file="arm_connector.stl"/> | |||
| <mesh name="dc15_a01_horn_idle2_dummy" file="dc15_a01_horn_idle2_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_m_dummy" file="dc15_a01_case_m_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_f_dummy" file="dc15_a01_case_f_dummy.stl"/> | |||
| <mesh name="dc15_a01_horn_dummy" file="dc15_a01_horn_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_b_dummy" file="dc15_a01_case_b_dummy.stl"/> | |||
| <mesh name="connector" file="connector.stl"/> | |||
| <mesh name="shoulder_rotation" file="shoulder_rotation.stl"/> | |||
| <mesh name="static_side" file="static_side.stl"/> | |||
| <mesh name="moving_side" file="moving_side.stl"/> | |||
| <texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072" /> | |||
| <texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3" markrgb="0.8 0.8 0.8" width="300" height="300" /> | |||
| <material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2" /> | |||
| </asset> | |||
| <visual> | |||
| <headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0" /> | |||
| <rgba haze="0.15 0.25 0.35 1" /> | |||
| <global azimuth="150" elevation="-20" offheight="640" /> | |||
| </visual> | |||
| <worldbody> | |||
| <light pos="0 0 3" dir="0 0 -1" directional="false" /> | |||
| <body name="floor"> | |||
| <geom pos="0 0 0" name="floor" size="0 0 .125" type="plane" material="groundplane" conaffinity="1" contype="1" /> | |||
| </body> | |||
| <body name="cube" pos="0.1 0.1 0.01"> | |||
| <freejoint name="cube"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube" rgba="0.5 0 0 1" priority="1"/> | |||
| </body> | |||
| <camera name="camera_front" pos="0.049 0.888 0.317" xyaxes="-0.998 0.056 -0.000 -0.019 -0.335 0.942"/> | |||
| <camera name="camera_top" pos="0 0 1" euler="0 0 0" mode="fixed"/> | |||
| <camera name="camera_vizu" pos="-0.1 0.6 0.3" quat="-0.15 -0.1 0.6 1"/> | |||
| <geom pos="0.0401555 -0.0353754 -0.0242427" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="base"/> | |||
| <geom pos="0.0511555 0.0406246 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 -0.0184427" quat="0 0 1 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0401555 0.0326246 -0.0042427" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 -0.0184427" quat="0 0.707107 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 0.0099573" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.0406246 -0.0184427" quat="0 0.707107 -0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 -0.0184427" quat="0 -1 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 0.0099573" quat="0.707107 0 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch1_assembly" pos="0.0401555 0.0326246 0.0166573"> | |||
| <inertial pos="-0.000767103 -0.0121505 0.0134241" quat="0.498429 0.53272 -0.473938 0.493113" mass="0.0606831" diaginertia="1.86261e-05 1.72746e-05 1.11693e-05"/> | |||
| <joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" range="-3.14159 3.14159" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 -0.0209" type="mesh" rgba="0.231373 0.380392 0.705882 1" mesh="rotation_connector"/> | |||
| <geom pos="-0.014 0.008 0.0264" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0044" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0264" quat="0.707107 0 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0002 0 0.0154" quat="0.707107 0 -0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0044" quat="0.5 0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 0.008 0.0044" quat="0.5 0.5 -0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0264" quat="0.5 -0.5 0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0044" quat="0 0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0264" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch2_assembly" pos="-0.0188 0 0.0154" quat="0 0.707107 0 0.707107"> | |||
| <inertial pos="0.0766242 -0.00031229 0.0187402" quat="0.52596 0.513053 0.489778 0.469319" mass="0.0432446" diaginertia="7.21796e-05 7.03107e-05 1.07533e-05"/> | |||
| <joint name="shoulder_lift_joint" pos="0 0 0" axis="0 0 1" range="-1.5708 1.22173" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 0.019" quat="0.5 -0.5 -0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="arm_connector"/> | |||
| <geom pos="0.1083 -0.0148 0.03035" quat="1 0 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.00715" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.03025" quat="0 -1 0 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="pitch3_assembly" pos="0.1083 -0.0148 0.00425" quat="0.707107 0 0 0.707107"> | |||
| <inertial pos="-0.0551014 -0.00287792 0.0144813" quat="0.500323 0.499209 0.499868 0.5006" mass="0.0788335" diaginertia="6.80912e-05 6.45748e-05 9.84479e-06"/> | |||
| <joint name="elbow_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.48353 1.74533" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00863031 0.00847376 0.0145" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="connector"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02635" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00315" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02625" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="effector_roll_assembly" pos="-0.100476 -0.00269986 0.02925" quat="0 -0.707107 -0.707107 0"> | |||
| <inertial pos="-1.65017e-05 -0.02659 0.0195388" quat="0.936813 0.349829 -0.00055331 -0.000300569" mass="0.0240506" diaginertia="6.03208e-06 4.12894e-06 3.3522e-06"/> | |||
| <joint name="wrist_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.91986 1.91986" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.0109998 -0.0190002 0.039" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="shoulder_rotation"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0421002 0.0133967" quat="0 1 0 0" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0190002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="gripper_assembly" pos="-7.44154e-06 -0.0450002 0.0133967" quat="0.5 -0.5 -0.5 -0.5"> | |||
| <inertial pos="-0.00548595 -0.000433143 -0.0190793" quat="0.700194 0.164851 0.167361 0.674197" mass="0.0360627" diaginertia="1.3261e-05 1.231e-05 5.3532e-06"/> | |||
| <joint name="wrist_roll_joint" pos="0 0 0" axis="0 0 1" range="-2.96706 2.96706" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00075 -0.01475 -0.02" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.917647 0.917647 0.917647 1" mesh="static_side"/> | |||
| <geom pos="0.00755 0.01135 -0.013" quat="0.5 -0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.00755 -0.01185 -0.013" quat="0 -0.707107 0 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.00755 0.01125 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="moving_side" pos="0.00755 -0.01475 -0.013" quat="0.707107 -0.707107 0 0"> | |||
| <inertial pos="-0.000395599 0.022415 0.0145636" quat="0.722353 0.689129 0.0389102 0.0423547" mass="0.0089856" diaginertia="3.28451e-06 2.24898e-06 1.41539e-06"/> | |||
| <joint name="gripper_joint" pos="0 0 0" axis="0 0 1" range="-1.74533 0.0523599" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00838199 -0.000256591 -0.003" type="mesh" rgba="0.768627 0.886275 0.952941 1" mesh="moving_side"/> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </worldbody> | |||
| <actuator> | |||
| <position joint="shoulder_pan_joint" ctrlrange="-3.14159 3.14159" ctrllimited="true" kp="20" /> | |||
| <position joint="shoulder_lift_joint" ctrlrange="-1.5708 1.22173" ctrllimited="true" kp="20" /> | |||
| <position joint="elbow_flex_joint" ctrlrange="-1.48353 1.74533" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_flex_joint" ctrlrange="-1.91986 1.91986" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_roll_joint" ctrlrange="-2.96706 2.96706" ctrllimited="true" kp="20" /> | |||
| <position joint="gripper_joint" ctrlrange="-1.74533 0.0523599" ctrllimited="true" kp="20" /> | |||
| </actuator> | |||
| </mujoco> | |||
+ 141
- 0
examples/alexk-lcr/assets/simulation/stack_two_cubes.xml
View File
| @@ -0,0 +1,141 @@ | |||
| <mujoco model="bd1 scene"> | |||
| <option timestep="0.005"/> | |||
| <compiler angle="radian" autolimits="true"/> | |||
| <asset> | |||
| <mesh name="base" file="base.stl"/> | |||
| <mesh name="dc11_a01_spacer_dummy" file="dc11_a01_spacer_dummy.stl"/> | |||
| <mesh name="dc11_a01_dummy" file="dc11_a01_dummy.stl"/> | |||
| <mesh name="rotation_connector" file="rotation_connector.stl"/> | |||
| <mesh name="arm_connector" file="arm_connector.stl"/> | |||
| <mesh name="dc15_a01_horn_idle2_dummy" file="dc15_a01_horn_idle2_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_m_dummy" file="dc15_a01_case_m_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_f_dummy" file="dc15_a01_case_f_dummy.stl"/> | |||
| <mesh name="dc15_a01_horn_dummy" file="dc15_a01_horn_dummy.stl"/> | |||
| <mesh name="dc15_a01_case_b_dummy" file="dc15_a01_case_b_dummy.stl"/> | |||
| <mesh name="connector" file="connector.stl"/> | |||
| <mesh name="shoulder_rotation" file="shoulder_rotation.stl"/> | |||
| <mesh name="static_side" file="static_side.stl"/> | |||
| <mesh name="moving_side" file="moving_side.stl"/> | |||
| <texture type="skybox" builtin="gradient" rgb1="0.3 0.5 0.7" rgb2="0 0 0" width="512" height="3072" /> | |||
| <texture type="2d" name="groundplane" builtin="checker" mark="edge" rgb1="0.2 0.3 0.4" rgb2="0.1 0.2 0.3" markrgb="0.8 0.8 0.8" width="300" height="300" /> | |||
| <material name="groundplane" texture="groundplane" texuniform="true" texrepeat="5 5" reflectance="0.2" /> | |||
| </asset> | |||
| <visual> | |||
| <headlight diffuse="0.6 0.6 0.6" ambient="0.3 0.3 0.3" specular="0 0 0" /> | |||
| <rgba haze="0.15 0.25 0.35 1" /> | |||
| <global azimuth="150" elevation="-20" offheight="640" /> | |||
| </visual> | |||
| <worldbody> | |||
| <light pos="0 0 3" dir="0 0 -1" directional="false" /> | |||
| <body name="floor"> | |||
| <geom pos="0 0 0" name="floor" size="0 0 .125" type="plane" material="groundplane" conaffinity="1" contype="1" /> | |||
| </body> | |||
| <body name="cube_red" pos="0.1 0.1 0.01"> | |||
| <freejoint name="cube_red"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube_red" rgba="0.5 0 0 1" priority="1"/> | |||
| </body> | |||
| <body name="cube_blue" pos="-0.1 -0.1 0.01"> | |||
| <freejoint name="cube_blue"/> | |||
| <inertial pos="0 0 0" mass="0.1" diaginertia="0.00001125 0.00001125 0.00001125"/> | |||
| <geom friction="0.5" condim="3" pos="0 0 0" size="0.015 0.015 0.015" type="box" name="cube_blue" rgba="0 0 0.5 1" priority="1"/> | |||
| </body> | |||
| <camera name="camera_front" pos="0.049 0.888 0.317" xyaxes="-0.998 0.056 -0.000 -0.019 -0.335 0.942"/> | |||
| <camera name="camera_top" pos="0 0 1" euler="0 0 0" mode="fixed"/> | |||
| <camera name="camera_vizu" pos="-0.1 0.6 0.3" quat="-0.15 -0.1 0.6 1"/> | |||
| <geom pos="0.0401555 -0.0353754 -0.0242427" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="base"/> | |||
| <geom pos="0.0511555 0.0406246 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 0.0099573" quat="0 0 0 1" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 -0.0184427" quat="0 0 1 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0401555 0.0326246 -0.0042427" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0291555 0.000624643 -0.0184427" quat="0 0.707107 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 0.0099573" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.0406246 -0.0184427" quat="0 0.707107 -0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0291555 0.0406246 -0.0184427" quat="0 -1 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0511555 0.000624643 0.0099573" quat="0.707107 0 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch1_assembly" pos="0.0401555 0.0326246 0.0166573"> | |||
| <inertial pos="-0.000767103 -0.0121505 0.0134241" quat="0.498429 0.53272 -0.473938 0.493113" mass="0.0606831" diaginertia="1.86261e-05 1.72746e-05 1.11693e-05"/> | |||
| <joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" range="-3.14159 3.14159" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 -0.0209" type="mesh" rgba="0.231373 0.380392 0.705882 1" mesh="rotation_connector"/> | |||
| <geom pos="-0.014 0.008 0.0264" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0044" quat="0 -0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0264" quat="0.707107 0 0.707107 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0002 0 0.0154" quat="0.707107 0 -0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc11_a01_dummy"/> | |||
| <geom pos="0.0144 -0.032 0.0044" quat="0.5 0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 0.008 0.0044" quat="0.5 0.5 -0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0264" quat="0.5 -0.5 0.5 -0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="0.0144 0.008 0.0044" quat="0 0.707107 0 0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <geom pos="-0.014 -0.032 0.0264" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc11_a01_spacer_dummy"/> | |||
| <body name="pitch2_assembly" pos="-0.0188 0 0.0154" quat="0 0.707107 0 0.707107"> | |||
| <inertial pos="0.0766242 -0.00031229 0.0187402" quat="0.52596 0.513053 0.489778 0.469319" mass="0.0432446" diaginertia="7.21796e-05 7.03107e-05 1.07533e-05"/> | |||
| <joint name="shoulder_lift_joint" pos="0 0 0" axis="0 0 1" range="-1.5708 1.22173" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="0 0 0.019" quat="0.5 -0.5 -0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="arm_connector"/> | |||
| <geom pos="0.1083 -0.0148 0.03035" quat="1 0 0 0" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.01075" quat="0 -1 0 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.00715" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.1083 -0.0148 0.03025" quat="0 -1 0 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="pitch3_assembly" pos="0.1083 -0.0148 0.00425" quat="0.707107 0 0 0.707107"> | |||
| <inertial pos="-0.0551014 -0.00287792 0.0144813" quat="0.500323 0.499209 0.499868 0.5006" mass="0.0788335" diaginertia="6.80912e-05 6.45748e-05 9.84479e-06"/> | |||
| <joint name="elbow_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.48353 1.74533" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00863031 0.00847376 0.0145" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="connector"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02635" quat="0.707107 0 0 -0.707107" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00675" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.00315" quat="0.5 -0.5 -0.5 0.5" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-0.100476 -0.00269986 0.02625" quat="0 -0.707107 0.707107 0" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="effector_roll_assembly" pos="-0.100476 -0.00269986 0.02925" quat="0 -0.707107 -0.707107 0"> | |||
| <inertial pos="-1.65017e-05 -0.02659 0.0195388" quat="0.936813 0.349829 -0.00055331 -0.000300569" mass="0.0240506" diaginertia="6.03208e-06 4.12894e-06 3.3522e-06"/> | |||
| <joint name="wrist_flex_joint" pos="0 0 0" axis="0 0 1" range="-1.91986 1.91986" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.0109998 -0.0190002 0.039" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="shoulder_rotation"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0385002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0421002 0.0133967" quat="0 1 0 0" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="-7.44154e-06 -0.0190002 0.0133967" quat="0 0 0.707107 -0.707107" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="gripper_assembly" pos="-7.44154e-06 -0.0450002 0.0133967" quat="0.5 -0.5 -0.5 -0.5"> | |||
| <inertial pos="-0.00548595 -0.000433143 -0.0190793" quat="0.700194 0.164851 0.167361 0.674197" mass="0.0360627" diaginertia="1.3261e-05 1.231e-05 5.3532e-06"/> | |||
| <joint name="wrist_roll_joint" pos="0 0 0" axis="0 0 1" range="-2.96706 2.96706" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00075 -0.01475 -0.02" quat="0.707107 -0.707107 0 0" type="mesh" rgba="0.917647 0.917647 0.917647 1" mesh="static_side"/> | |||
| <geom pos="0.00755 0.01135 -0.013" quat="0.5 -0.5 0.5 0.5" type="mesh" rgba="0.647059 0.647059 0.647059 1" mesh="dc15_a01_horn_idle2_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.615686 0.811765 0.929412 1" mesh="dc15_a01_case_m_dummy"/> | |||
| <geom pos="0.00755 -0.00825 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.980392 0.713726 0.00392157 1" mesh="dc15_a01_case_f_dummy"/> | |||
| <geom pos="0.00755 -0.01185 -0.013" quat="0 -0.707107 0 -0.707107" type="mesh" rgba="0.972549 0.529412 0.00392157 1" mesh="dc15_a01_horn_dummy"/> | |||
| <geom pos="0.00755 0.01125 -0.013" quat="0.5 0.5 0.5 -0.5" type="mesh" rgba="0.498039 0.498039 0.498039 1" mesh="dc15_a01_case_b_dummy"/> | |||
| <body name="moving_side" pos="0.00755 -0.01475 -0.013" quat="0.707107 -0.707107 0 0"> | |||
| <inertial pos="-0.000395599 0.022415 0.0145636" quat="0.722353 0.689129 0.0389102 0.0423547" mass="0.0089856" diaginertia="3.28451e-06 2.24898e-06 1.41539e-06"/> | |||
| <joint name="gripper_joint" pos="0 0 0" axis="0 0 1" range="-1.74533 0.0523599" damping="0.1" actuatorfrcrange="-0.5 0.5" actuatorfrclimited="true"/> | |||
| <geom pos="-0.00838199 -0.000256591 -0.003" type="mesh" rgba="0.768627 0.886275 0.952941 1" mesh="moving_side"/> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </body> | |||
| </worldbody> | |||
| <actuator> | |||
| <position joint="shoulder_pan_joint" ctrlrange="-3.14159 3.14159" ctrllimited="true" kp="20" /> | |||
| <position joint="shoulder_lift_joint" ctrlrange="-1.5708 1.22173" ctrllimited="true" kp="20" /> | |||
| <position joint="elbow_flex_joint" ctrlrange="-1.48353 1.74533" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_flex_joint" ctrlrange="-1.91986 1.91986" ctrllimited="true" kp="20" /> | |||
| <position joint="wrist_roll_joint" ctrlrange="-2.96706 2.96706" ctrllimited="true" kp="20" /> | |||
| <position joint="gripper_joint" ctrlrange="-1.74533 0.0523599" ctrllimited="true" kp="20" /> | |||
| </actuator> | |||
| </mujoco> | |||
+ 328
- 0
examples/alexk-lcr/bus.py
View File
| @@ -0,0 +1,328 @@ | |||
| import enum | |||
| import pyarrow as pa | |||
| from typing import Union | |||
| from dynamixel_sdk import ( | |||
| PacketHandler, | |||
| PortHandler, | |||
| COMM_SUCCESS, | |||
| GroupSyncRead, | |||
| GroupSyncWrite, | |||
| ) | |||
| from dynamixel_sdk import DXL_HIBYTE, DXL_HIWORD, DXL_LOBYTE, DXL_LOWORD | |||
| PROTOCOL_VERSION = 2.0 | |||
| BAUD_RATE = 1_000_000 | |||
| TIMEOUT_MS = 1000 | |||
| def wrap_joints_and_values( | |||
| joints: Union[list[str], pa.Array], | |||
| values: Union[int, list[int], pa.Array], | |||
| ) -> pa.StructArray: | |||
| """ | |||
| Wraps joints and their corresponding values into a structured array. | |||
| :param joints: A list, numpy array, or pyarrow array of joint names. | |||
| :type joints: Union[list[str], np.array, pa.Array] | |||
| :param values: A single integer value, or a list, numpy array, or pyarrow array of integer values. | |||
| If a single integer is provided, it will be broadcasted to all joints. | |||
| :type values: Union[int, list[int], np.array, pa.Array] | |||
| :return: A structured array with two fields: | |||
| - "joints": A string field containing the names of the joints. | |||
| - "values": An Int32Array containing the values corresponding to the joints. | |||
| :rtype: pa.StructArray | |||
| :raises ValueError: If lengths of joints and values do not match. | |||
| Example: | |||
| -------- | |||
| joints = ["shoulder_pan", "shoulder_lift", "elbow_flex"] | |||
| values = [100, 200, 300] | |||
| struct_array = wrap_joints_and_values(joints, values) | |||
| This example wraps the given joints and their corresponding values into a structured array. | |||
| Another example with a single integer value: | |||
| joints = ["shoulder_pan", "shoulder_lift", "elbow_flex"] | |||
| value = 150 | |||
| struct_array = wrap_joints_and_values(joints, value) | |||
| This example broadcasts the single integer value to all joints and wraps them into a structured array. | |||
| """ | |||
| if isinstance(values, int): | |||
| values = [values] * len(joints) | |||
| if len(joints) != len(values): | |||
| raise ValueError("joints and values must have the same length") | |||
| mask = pa.array([False] * len(values), type=pa.bool_()) | |||
| if isinstance(values, list): | |||
| mask = pa.array([value is None for value in values]) | |||
| if isinstance(values, pa.Array): | |||
| mask = values.is_null() | |||
| return pa.StructArray.from_arrays( | |||
| arrays=[joints, values], names=["joints", "values"], mask=mask | |||
| ).drop_null() | |||
| class TorqueMode(enum.Enum): | |||
| ENABLED = pa.scalar(1, pa.uint32()) | |||
| DISABLED = pa.scalar(0, pa.uint32()) | |||
| class OperatingMode(enum.Enum): | |||
| VELOCITY = pa.scalar(1, pa.uint32()) | |||
| POSITION = pa.scalar(3, pa.uint32()) | |||
| EXTENDED_POSITION = pa.scalar(4, pa.uint32()) | |||
| CURRENT_CONTROLLED_POSITION = pa.scalar(5, pa.uint32()) | |||
| PWM = pa.scalar(16, pa.uint32()) | |||
| X_SERIES_CONTROL_TABLE = [ | |||
| ("Model_Number", 0, 2), | |||
| ("Model_Information", 2, 4), | |||
| ("Firmware_Version", 6, 1), | |||
| ("ID", 7, 1), | |||
| ("Baud_Rate", 8, 1), | |||
| ("Return_Delay_Time", 9, 1), | |||
| ("Drive_Mode", 10, 1), | |||
| ("Operating_Mode", 11, 1), | |||
| ("Secondary_ID", 12, 1), | |||
| ("Protocol_Type", 13, 1), | |||
| ("Homing_Offset", 20, 4), | |||
| ("Moving_Threshold", 24, 4), | |||
| ("Temperature_Limit", 31, 1), | |||
| ("Max_Voltage_Limit", 32, 2), | |||
| ("Min_Voltage_Limit", 34, 2), | |||
| ("PWM_Limit", 36, 2), | |||
| ("Current_Limit", 38, 2), | |||
| ("Acceleration_Limit", 40, 4), | |||
| ("Velocity_Limit", 44, 4), | |||
| ("Max_Position_Limit", 48, 4), | |||
| ("Min_Position_Limit", 52, 4), | |||
| ("Shutdown", 63, 1), | |||
| ("Torque_Enable", 64, 1), | |||
| ("LED", 65, 1), | |||
| ("Status_Return_Level", 68, 1), | |||
| ("Registered_Instruction", 69, 1), | |||
| ("Hardware_Error_Status", 70, 1), | |||
| ("Velocity_I_Gain", 76, 2), | |||
| ("Velocity_P_Gain", 78, 2), | |||
| ("Position_D_Gain", 80, 2), | |||
| ("Position_I_Gain", 82, 2), | |||
| ("Position_P_Gain", 84, 2), | |||
| ("Feedforward_2nd_Gain", 88, 2), | |||
| ("Feedforward_1st_Gain", 90, 2), | |||
| ("Bus_Watchdog", 98, 1), | |||
| ("Goal_PWM", 100, 2), | |||
| ("Goal_Current", 102, 2), | |||
| ("Goal_Velocity", 104, 4), | |||
| ("Profile_Acceleration", 108, 4), | |||
| ("Profile_Velocity", 112, 4), | |||
| ("Goal_Position", 116, 4), | |||
| ("Realtime_Tick", 120, 2), | |||
| ("Moving", 122, 1), | |||
| ("Moving_Status", 123, 1), | |||
| ("Present_PWM", 124, 2), | |||
| ("Present_Current", 126, 2), | |||
| ("Present_Velocity", 128, 4), | |||
| ("Present_Position", 132, 4), | |||
| ("Velocity_Trajectory", 136, 4), | |||
| ("Position_Trajectory", 140, 4), | |||
| ("Present_Input_Voltage", 144, 2), | |||
| ("Present_Temperature", 146, 1), | |||
| ] | |||
| MODEL_CONTROL_TABLE = { | |||
| "x_series": X_SERIES_CONTROL_TABLE, | |||
| "xl330-m077": X_SERIES_CONTROL_TABLE, | |||
| "xl330-m288": X_SERIES_CONTROL_TABLE, | |||
| "xl430-w250": X_SERIES_CONTROL_TABLE, | |||
| "xm430-w350": X_SERIES_CONTROL_TABLE, | |||
| "xm540-w270": X_SERIES_CONTROL_TABLE, | |||
| } | |||
| class DynamixelBus: | |||
| def __init__(self, port: str, description: dict[str, (int, str)]): | |||
| self.port = port | |||
| self.descriptions = description | |||
| self.motor_ctrl = {} | |||
| for motor_name, (motor_id, motor_model) in description.items(): | |||
| if motor_model not in MODEL_CONTROL_TABLE: | |||
| raise ValueError(f"Model {motor_model} is not supported.") | |||
| self.motor_ctrl[motor_name] = {} | |||
| self.motor_ctrl[motor_name]["id"] = motor_id | |||
| for data_name, address, bytes_size in MODEL_CONTROL_TABLE[motor_model]: | |||
| self.motor_ctrl[motor_name][data_name] = { | |||
| "addr": address, | |||
| "bytes_size": bytes_size, | |||
| } | |||
| self.port_handler = PortHandler(self.port) | |||
| self.packet_handler = PacketHandler(PROTOCOL_VERSION) | |||
| if not self.port_handler.openPort(): | |||
| raise OSError(f"Failed to open port {self.port}") | |||
| self.port_handler.setBaudRate(BAUD_RATE) | |||
| self.port_handler.setPacketTimeoutMillis(TIMEOUT_MS) | |||
| self.group_readers = {} | |||
| self.group_writers = {} | |||
| def close(self): | |||
| self.port_handler.closePort() | |||
| def write(self, data_name: str, data: pa.StructArray): | |||
| motor_ids = [ | |||
| self.motor_ctrl[motor_name.as_py()]["id"] | |||
| for motor_name in data.field("joints") | |||
| ] | |||
| values = pa.Array.from_buffers( | |||
| pa.uint32(), | |||
| length=len(data.field("values")), | |||
| buffers=data.field("values").buffers(), | |||
| ) | |||
| group_key = f"{data_name}_" + "_".join([str(idx) for idx in motor_ids]) | |||
| first_motor_name = list(self.motor_ctrl.keys())[0] | |||
| packet_address = self.motor_ctrl[first_motor_name][data_name]["addr"] | |||
| packet_bytes_size = self.motor_ctrl[first_motor_name][data_name]["bytes_size"] | |||
| init_group = data_name not in self.group_readers | |||
| if init_group: | |||
| self.group_writers[group_key] = GroupSyncWrite( | |||
| self.port_handler, | |||
| self.packet_handler, | |||
| packet_address, | |||
| packet_bytes_size, | |||
| ) | |||
| for idx, value in zip(motor_ids, values): | |||
| value = value.as_py() | |||
| if value is None: | |||
| continue | |||
| if packet_bytes_size == 1: | |||
| data = [ | |||
| DXL_LOBYTE(DXL_LOWORD(value)), | |||
| ] | |||
| elif packet_bytes_size == 2: | |||
| data = [ | |||
| DXL_LOBYTE(DXL_LOWORD(value)), | |||
| DXL_HIBYTE(DXL_LOWORD(value)), | |||
| ] | |||
| elif packet_bytes_size == 4: | |||
| data = [ | |||
| DXL_LOBYTE(DXL_LOWORD(value)), | |||
| DXL_HIBYTE(DXL_LOWORD(value)), | |||
| DXL_LOBYTE(DXL_HIWORD(value)), | |||
| DXL_HIBYTE(DXL_HIWORD(value)), | |||
| ] | |||
| else: | |||
| raise NotImplementedError( | |||
| f"Value of the number of bytes to be sent is expected to be in [1, 2, 4], but {packet_bytes_size} " | |||
| f"is provided instead." | |||
| ) | |||
| if init_group: | |||
| self.group_writers[group_key].addParam(idx, data) | |||
| else: | |||
| self.group_writers[group_key].changeParam(idx, data) | |||
| comm = self.group_writers[group_key].txPacket() | |||
| if comm != COMM_SUCCESS: | |||
| raise ConnectionError( | |||
| f"Write failed due to communication error on port {self.port} for group_key {group_key}: " | |||
| f"{self.packet_handler.getTxRxResult(comm)}" | |||
| ) | |||
| def read(self, data_name: str, motor_names: pa.Array) -> pa.StructArray: | |||
| motor_ids = [ | |||
| self.motor_ctrl[motor_name.as_py()]["id"] for motor_name in motor_names | |||
| ] | |||
| group_key = f"{data_name}_" + "_".join([str(idx) for idx in motor_ids]) | |||
| first_motor_name = list(self.motor_ctrl.keys())[0] | |||
| packet_address = self.motor_ctrl[first_motor_name][data_name]["addr"] | |||
| packet_bytes_size = self.motor_ctrl[first_motor_name][data_name]["bytes_size"] | |||
| if data_name not in self.group_readers: | |||
| self.group_readers[group_key] = GroupSyncRead( | |||
| self.port_handler, | |||
| self.packet_handler, | |||
| packet_address, | |||
| packet_bytes_size, | |||
| ) | |||
| for idx in motor_ids: | |||
| self.group_readers[group_key].addParam(idx) | |||
| comm = self.group_readers[group_key].txRxPacket() | |||
| if comm != COMM_SUCCESS: | |||
| raise ConnectionError( | |||
| f"Read failed due to communication error on port {self.port} for group_key {group_key}: " | |||
| f"{self.packet_handler.getTxRxResult(comm)}" | |||
| ) | |||
| values = pa.array( | |||
| [ | |||
| self.group_readers[group_key].getData( | |||
| idx, packet_address, packet_bytes_size | |||
| ) | |||
| for idx in motor_ids | |||
| ], | |||
| type=pa.uint32(), | |||
| ) | |||
| values = values.from_buffers(pa.int32(), len(values), values.buffers()) | |||
| return wrap_joints_and_values(motor_names, values) | |||
| def write_torque_enable(self, torque_mode: pa.StructArray): | |||
| self.write("Torque_Enable", torque_mode) | |||
| def write_operating_mode(self, operating_mode: pa.StructArray): | |||
| self.write("Operating_Mode", operating_mode) | |||
| def read_position(self, motor_names: pa.Array) -> pa.StructArray: | |||
| return self.read("Present_Position", motor_names) | |||
| def read_velocity(self, motor_names: pa.Array) -> pa.StructArray: | |||
| return self.read("Present_Velocity", motor_names) | |||
| def read_current(self, motor_names: pa.Array) -> pa.StructArray: | |||
| return self.read("Present_Current", motor_names) | |||
| def write_goal_position(self, goal_position: pa.StructArray): | |||
| self.write("Goal_Position", goal_position) | |||
| def write_goal_current(self, goal_current: pa.StructArray): | |||
| self.write("Goal_Current", goal_current) | |||
| def write_position_p_gain(self, position_p_gain: pa.StructArray): | |||
| self.write("Position_P_Gain", position_p_gain) | |||
| def write_position_i_gain(self, position_i_gain: pa.StructArray): | |||
| self.write("Position_I_Gain", position_i_gain) | |||
| def write_position_d_gain(self, position_d_gain: pa.StructArray): | |||
| self.write("Position_D_Gain", position_d_gain) | |||
+ 0
- 0
examples/alexk-lcr/configs/.gitkeep
View File
+ 213
- 0
examples/alexk-lcr/configure.py
View File
| @@ -0,0 +1,213 @@ | |||
| """ | |||
| LCR Configuration Tool: This program is used to automatically configure the Low Cost Robot (LCR) for the user. | |||
| The program will: | |||
| 1. Disable all torque motors of provided LCR. | |||
| 2. Ask the user to move the LCR to the position 1 (see CONFIGURING.md for more details). | |||
| 3. Record the position of the LCR. | |||
| 4. Ask the user to move the LCR to the position 2 (see CONFIGURING.md for more details). | |||
| 5. Record the position of the LCR. | |||
| 8. Calculate interpolation functions. | |||
| 9. Let the user verify in real time that the LCR is working properly. | |||
| It will also enable all appropriate operating modes for the LCR. | |||
| """ | |||
| import argparse | |||
| import time | |||
| import json | |||
| import pyarrow as pa | |||
| from bus import DynamixelBus, TorqueMode, OperatingMode | |||
| from pwm_position_control.transform import pwm_to_logical_arrow, wrap_joints_and_values | |||
| from pwm_position_control.tables import ( | |||
| construct_logical_to_pwm_conversion_table_arrow, | |||
| construct_pwm_to_logical_conversion_table_arrow, | |||
| ) | |||
| from pwm_position_control.functions import construct_control_table | |||
| FULL_ARM = pa.array( | |||
| [ | |||
| "shoulder_pan", | |||
| "shoulder_lift", | |||
| "elbow_flex", | |||
| "wrist_flex", | |||
| "wrist_roll", | |||
| "gripper", | |||
| ], | |||
| type=pa.string(), | |||
| ) | |||
| ARM_WITHOUT_GRIPPER = pa.array( | |||
| ["shoulder_pan", "shoulder_lift", "elbow_flex", "wrist_flex", "wrist_roll"], | |||
| type=pa.string(), | |||
| ) | |||
| GRIPPER = pa.array(["gripper"], type=pa.string()) | |||
| def pause(): | |||
| input("Press Enter to continue...") | |||
| def configure_servos(bus: DynamixelBus): | |||
| bus.write_torque_enable( | |||
| wrap_joints_and_values(FULL_ARM, [TorqueMode.DISABLED.value] * 6) | |||
| ) | |||
| bus.write_operating_mode( | |||
| wrap_joints_and_values( | |||
| ARM_WITHOUT_GRIPPER, [OperatingMode.EXTENDED_POSITION.value] * 5 | |||
| ) | |||
| ) | |||
| bus.write_operating_mode( | |||
| wrap_joints_and_values( | |||
| GRIPPER, [OperatingMode.CURRENT_CONTROLLED_POSITION.value] | |||
| ) | |||
| ) | |||
| def main(): | |||
| parser = argparse.ArgumentParser( | |||
| description="LCR Auto Configure: This program is used to automatically configure the Low Cost Robot (LCR) for " | |||
| "the user." | |||
| ) | |||
| parser.add_argument("--port", type=str, required=True, help="The port of the LCR.") | |||
| parser.add_argument( | |||
| "--right", | |||
| action="store_true", | |||
| help="If the LCR is on the right side of the user.", | |||
| ) | |||
| parser.add_argument( | |||
| "--left", | |||
| action="store_true", | |||
| help="If the LCR is on the left side of the user.", | |||
| ) | |||
| parser.add_argument( | |||
| "--follower", | |||
| action="store_true", | |||
| help="If the LCR is the follower of the user.", | |||
| ) | |||
| parser.add_argument( | |||
| "--leader", action="store_true", help="If the LCR is the leader of the user." | |||
| ) | |||
| args = parser.parse_args() | |||
| if args.right and args.left: | |||
| raise ValueError("You cannot specify both --right and --left.") | |||
| if args.follower and args.leader: | |||
| raise ValueError("You cannot specify both --follower and --leader.") | |||
| targets = ( | |||
| wrap_joints_and_values(FULL_ARM, [0, -90, 90, 0, -90, 0]), | |||
| wrap_joints_and_values(FULL_ARM, [90, 0, 0, 90, 0, -90]), | |||
| ) | |||
| arm = DynamixelBus( | |||
| args.port, | |||
| { | |||
| "shoulder_pan": (1, "x_series"), | |||
| "shoulder_lift": (2, "x_series"), | |||
| "elbow_flex": (3, "x_series"), | |||
| "wrist_flex": (4, "x_series"), | |||
| "wrist_roll": (5, "x_series"), | |||
| "gripper": (6, "x_series"), | |||
| }, | |||
| ) | |||
| configure_servos(arm) | |||
| print("Please move the LCR to the first position.") | |||
| pause() | |||
| pwm_position_1 = arm.read_position(FULL_ARM) | |||
| print("Please move the LCR to the second position.") | |||
| pause() | |||
| pwm_position_2 = arm.read_position(FULL_ARM) | |||
| print("Configuration completed.") | |||
| pwm_positions = (pwm_position_1, pwm_position_2) | |||
| pwm_to_logical_conversion_table = construct_pwm_to_logical_conversion_table_arrow( | |||
| pwm_positions, targets | |||
| ) | |||
| logical_to_pwm_conversion_table = construct_logical_to_pwm_conversion_table_arrow( | |||
| pwm_positions, targets | |||
| ) | |||
| control_table_json = {} | |||
| for i in range(len(FULL_ARM)): | |||
| model = ( | |||
| "xl430-w250" | |||
| if i <= 1 and args.follower | |||
| else "xl330-m288" if args.follower else "xl330-m077" | |||
| ) | |||
| control_table_json[FULL_ARM[i].as_py()] = { | |||
| "id": i + 1, | |||
| "model": model, | |||
| "torque": ( | |||
| True if args.follower else True if args.leader and i == 5 else False | |||
| ), | |||
| "goal_current": ( | |||
| 500 | |||
| if args.follower and i == 5 | |||
| else 40 if args.leader and i == 5 else None | |||
| ), | |||
| "goal_position": -40.0 if args.leader and i == 5 else None, | |||
| "pwm_to_logical": pwm_to_logical_conversion_table[FULL_ARM[i].as_py()], | |||
| "logical_to_pwm": logical_to_pwm_conversion_table[FULL_ARM[i].as_py()], | |||
| "P": ( | |||
| 640 | |||
| if model == "xl430-w250" | |||
| else 1500 if model == "xl330-m288" and i != 5 else 250 | |||
| ), | |||
| "I": 0, | |||
| "D": 3600 if model == "xl430-w250" else 600, | |||
| } | |||
| left = "left" if args.left else "right" | |||
| leader = "leader" if args.leader else "follower" | |||
| path = ( | |||
| input( | |||
| f"Please enter the path of the configuration file (default is ./examples/alexk-lcr/configs/{leader}.{left}.json): " | |||
| ) | |||
| or f"./examples/alexk-lcr/configs/{leader}.{left}.json" | |||
| ) | |||
| with open(path, "w") as file: | |||
| json.dump(control_table_json, file) | |||
| control_table = construct_control_table( | |||
| pwm_to_logical_conversion_table, logical_to_pwm_conversion_table | |||
| ) | |||
| while True: | |||
| try: | |||
| pwm_position = arm.read_position(FULL_ARM) | |||
| logical_position = pwm_to_logical_arrow( | |||
| pwm_position, control_table, ranged=True | |||
| ).field("values") | |||
| print(f"Logical Position: {logical_position}") | |||
| except ConnectionError: | |||
| print( | |||
| "Connection error occurred. Please check the connection and try again." | |||
| ) | |||
| time.sleep(0.5) | |||
| if __name__ == "__main__": | |||
| main() | |||
+ 74
- 0
examples/alexk-lcr/graphs/bi_teleop_real.yml
View File
| @@ -0,0 +1,74 @@ | |||
| nodes: | |||
| - id: lcr-left-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 # pull the position every 10ms | |||
| write_goal_position: lcr-to-lcr-left/leader_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030111 | |||
| CONFIG: ../configs/leader.left.json | |||
| - id: lcr-to-lcr-left | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_lcr.py | |||
| inputs: | |||
| leader_position: lcr-left-leader/position | |||
| follower_position: lcr-left-follower/position | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-left-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 | |||
| write_goal_position: lcr-to-lcr-left/follower_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0031141 | |||
| CONFIG: ../configs/follower.left.json | |||
| - id: lcr-right-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 # pull the position every 10ms | |||
| write_goal_position: lcr-to-lcr-right/leader_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030531 | |||
| CONFIG: ../configs/leader.right.json | |||
| - id: lcr-to-lcr-right | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_lcr.py | |||
| inputs: | |||
| leader_position: lcr-right-leader/position | |||
| follower_position: lcr-right-follower/position | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.right.json | |||
| FOLLOWER_CONTROL: ../configs/follower.right.json | |||
| - id: lcr-right-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 | |||
| write_goal_position: lcr-to-lcr-right/follower_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0032531 | |||
| CONFIG: ../configs/follower.right.json | |||
+ 40
- 0
examples/alexk-lcr/graphs/mono_replay_real.yml
View File
| @@ -0,0 +1,40 @@ | |||
| nodes: | |||
| - id: replay-client | |||
| build: pip install ../../../node-hub/replay-client | |||
| path: replay-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/33 | |||
| outputs: | |||
| - position | |||
| - end | |||
| env: | |||
| PATH: ../../../datasets/enzo2 | |||
| EPISODE: 1 | |||
| - id: replay-to-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_replay_to_lcr.py | |||
| inputs: | |||
| leader_position: | |||
| source: replay-client/position | |||
| queue_size: 1 | |||
| follower_position: | |||
| source: lcr-follower/position | |||
| queue_size: 1 | |||
| outputs: | |||
| - follower_goal | |||
| env: | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/33 | |||
| write_goal_position: replay-to-lcr/follower_goal | |||
| end: replay-client/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0031141 | |||
| CONFIG: ../configs/follower.left.json | |||
+ 37
- 0
examples/alexk-lcr/graphs/mono_teleop_real.yml
View File
| @@ -0,0 +1,37 @@ | |||
| nodes: | |||
| - id: lcr-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 | |||
| write_goal_position: lcr-to-lcr/leader_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030111 | |||
| CONFIG: ../configs/leader.left.json | |||
| - id: lcr-to-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_lcr.py | |||
| inputs: | |||
| leader_position: lcr-leader/position | |||
| follower_position: lcr-follower/position | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: dora/timer/millis/10 | |||
| write_goal_position: lcr-to-lcr/follower_goal | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0031141 | |||
| CONFIG: ../configs/follower.left.json | |||
+ 70
- 0
examples/alexk-lcr/graphs/mono_teleop_real_and_simu.yml
View File
| @@ -0,0 +1,70 @@ | |||
| nodes: | |||
| - id: lcr-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: simu-lcr-follower/tick | |||
| write_goal_position: lcr-to-lcr/leader_goal | |||
| end: simu-lcr-follower/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030111 | |||
| CONFIG: ../configs/leader.left.json | |||
| - id: lcr-to-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_lcr.py | |||
| inputs: | |||
| leader_position: lcr-leader/position | |||
| follower_position: lcr-follower/position | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: simu-lcr-follower/tick | |||
| write_goal_position: lcr-to-lcr/follower_goal | |||
| end: simu-lcr-follower/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0031141 | |||
| CONFIG: ../configs/follower.left.json | |||
| - id: lcr-to-simu-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_simu_lcr.py | |||
| inputs: | |||
| leader_position: | |||
| source: lcr-leader/position | |||
| queue_size: 1 | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| - id: simu-lcr-follower | |||
| build: pip install ../../../node-hub/mujoco-client | |||
| # for windows | |||
| # path: mujoco-client | |||
| # for macos | |||
| path: mjpython | |||
| args: ../../../node-hub/mujoco-client/mujoco_client/main.py | |||
| inputs: | |||
| write_goal_position: lcr-to-simu-lcr/follower_goal | |||
| tick: dora/timer/millis/10 | |||
| outputs: | |||
| - position | |||
| - tick | |||
| - end | |||
| env: | |||
| SCENE: ../assets/simulation/reach_cube.xml | |||
| CONFIG: ../configs/follower.left.json | |||
+ 43
- 0
examples/alexk-lcr/graphs/mono_teleop_simu.yml
View File
| @@ -0,0 +1,43 @@ | |||
| nodes: | |||
| - id: lcr-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: simu-lcr-follower/tick | |||
| write_goal_position: lcr-to-simu-lcr/leader_goal | |||
| end: simu-lcr-follower/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030111 | |||
| CONFIG: ../configs/leader.left.json | |||
| - id: lcr-to-simu-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_simu_lcr.py | |||
| inputs: | |||
| leader_position: lcr-leader/position | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| - id: simu-lcr-follower | |||
| build: pip install ../../../node-hub/mujoco-client | |||
| # for windows | |||
| # path: mujoco-client | |||
| # for macos | |||
| path: mjpython | |||
| args: ../../../node-hub/mujoco-client/mujoco_client/main.py | |||
| inputs: | |||
| write_goal_position: lcr-to-simu-lcr/follower_goal | |||
| tick: dora/timer/millis/10 | |||
| outputs: | |||
| - position | |||
| - tick | |||
| - end | |||
| env: | |||
| SCENE: ../assets/simulation/reach_cube.xml | |||
| CONFIG: ../configs/follower.left.json | |||
+ 119
- 0
examples/alexk-lcr/graphs/record_mono_teleop_real.yml
View File
| @@ -0,0 +1,119 @@ | |||
| nodes: | |||
| - id: lcr-leader | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: | |||
| source: lerobot-dashboard/tick | |||
| queue_size: 1 | |||
| write_goal_position: lcr-to-lcr/leader_goal | |||
| end: lerobot-dashboard/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0030111 | |||
| CONFIG: ../configs/leader.left.json | |||
| - id: lcr-to-lcr | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_lcr.py | |||
| inputs: | |||
| leader_position: | |||
| source: lcr-leader/position | |||
| queue_size: 1 | |||
| follower_position: | |||
| source: lcr-follower/position | |||
| queue_size: 1 | |||
| outputs: | |||
| - follower_goal | |||
| - leader_goal | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-to-record | |||
| build: pip install git+https://github.com/Hennzau/pwm-position-control | |||
| path: ../nodes/interpolate_lcr_to_record.py | |||
| inputs: | |||
| leader_position: | |||
| source: lcr-leader/position | |||
| queue_size: 1 | |||
| follower_position: | |||
| source: lcr-follower/position | |||
| queue_size: 1 | |||
| outputs: | |||
| - logical_goal | |||
| - logical_position | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| - id: lcr-follower | |||
| build: pip install ../../../node-hub/dynamixel-client | |||
| path: dynamixel-client | |||
| inputs: | |||
| pull_position: | |||
| source: lerobot-dashboard/tick | |||
| queue_size: 1 | |||
| write_goal_position: | |||
| source: lcr-to-lcr/follower_goal | |||
| queue_size: 1 | |||
| end: lerobot-dashboard/end | |||
| outputs: | |||
| - position | |||
| env: | |||
| PORT: /dev/tty.usbmodem575E0031141 | |||
| CONFIG: ../configs/follower.left.json | |||
| - id: opencv-video-capture | |||
| build: pip install ../../../node-hub/opencv-video-capture | |||
| path: opencv-video-capture | |||
| inputs: | |||
| tick: | |||
| source: lerobot-dashboard/tick | |||
| queue_size: 1 | |||
| outputs: | |||
| - image | |||
| env: | |||
| PATH: 1 | |||
| IMAGE_WIDTH: 860 | |||
| IMAGE_HEIGHT: 540 | |||
| - id: video-encoder | |||
| build: pip install ../../../node-hub/video-encoder | |||
| path: video-encoder | |||
| inputs: | |||
| image: opencv-video-capture/image | |||
| episode_index: lerobot-dashboard/episode | |||
| outputs: | |||
| - image | |||
| env: | |||
| VIDEO_NAME: cam_up | |||
| FPS: 30 | |||
| - id: lerobot-dashboard | |||
| build: pip install ../../../node-hub/lerobot-dashboard | |||
| path: lerobot-dashboard | |||
| inputs: | |||
| tick: | |||
| source: dora/timer/millis/16 | |||
| queue_size: 1 | |||
| image_left: opencv-video-capture/image | |||
| outputs: | |||
| - tick | |||
| - episode | |||
| - failed | |||
| - end | |||
| env: | |||
| WINDOW_WIDTH: 1720 | |||
| WINDOW_HEIGHT: 540 | |||
| - id: dora-record | |||
| build: cargo install dora-record | |||
| path: dora-record | |||
| inputs: | |||
| action: lcr-to-record/logical_goal | |||
| observation.state: lcr-to-record/logical_position | |||
| episode_index: lerobot-dashboard/episode | |||
| failed_episode_index: lerobot-dashboard/failed | |||
| observation.images.cam_up: video-encoder/image | |||
+ 148
- 0
examples/alexk-lcr/nodes/interpolate_lcr_to_lcr.py
View File
| @@ -0,0 +1,148 @@ | |||
| import os | |||
| import argparse | |||
| import json | |||
| import pyarrow as pa | |||
| import pyarrow.compute as pc | |||
| from dora import Node | |||
| from pwm_position_control.transform import ( | |||
| wrap_joints_and_values, | |||
| pwm_to_logical_arrow, | |||
| logical_to_pwm_with_offset_arrow, | |||
| ) | |||
| from pwm_position_control.load import load_control_table_from_json_conversion_tables | |||
| def main(): | |||
| parser = argparse.ArgumentParser( | |||
| description="Interpolation LCR Node: This Dora node is used to calculates appropriate goal positions for the " | |||
| "LCR followers knowing a Leader position and Follower position." | |||
| ) | |||
| parser.add_argument( | |||
| "--name", | |||
| type=str, | |||
| required=False, | |||
| help="The name of the node in the dataflow.", | |||
| default="lcr-to-lcr", | |||
| ) | |||
| parser.add_argument( | |||
| "--leader-control", | |||
| type=str, | |||
| help="The configuration file for controlling the leader.", | |||
| default=None, | |||
| ) | |||
| parser.add_argument( | |||
| "--follower-control", | |||
| type=str, | |||
| help="The configuration file for controlling the follower.", | |||
| default=None, | |||
| ) | |||
| args = parser.parse_args() | |||
| if not os.environ.get("LEADER_CONTROL") and args.leader_control is None: | |||
| raise ValueError( | |||
| "The leader control is not set. Please set the configuration of the leader in the environment variables or " | |||
| "as an argument." | |||
| ) | |||
| if not os.environ.get("FOLLOWER_CONTROL") and args.follower_control is None: | |||
| raise ValueError( | |||
| "The follower control is not set. Please set the configuration of the follower in the environment " | |||
| "variables or as an argument." | |||
| ) | |||
| with open( | |||
| os.environ.get("LEADER_CONTROL") | |||
| if args.leader_control is None | |||
| else args.leader_control | |||
| ) as file: | |||
| leader_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables(leader_control, leader_control) | |||
| with open( | |||
| os.environ.get("FOLLOWER_CONTROL") | |||
| if args.follower_control is None | |||
| else args.follower_control | |||
| ) as file: | |||
| follower_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables( | |||
| follower_control, follower_control | |||
| ) | |||
| initial_mask = [ | |||
| True if leader_control[joint]["goal_position"] is not None else False | |||
| for joint in leader_control.keys() | |||
| ] | |||
| logical_leader_initial_goal = wrap_joints_and_values( | |||
| [ | |||
| joint | |||
| for joint in leader_control.keys() | |||
| if leader_control[joint]["goal_position"] is not None | |||
| ], | |||
| [ | |||
| leader_control[joint]["goal_position"] | |||
| for joint in leader_control.keys() | |||
| if leader_control[joint]["goal_position"] is not None | |||
| ], | |||
| ) | |||
| node = Node(args.name) | |||
| leader_initialized = False | |||
| follower_initialized = False | |||
| follower_position = None | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| event_id = event["id"] | |||
| if event_id == "leader_position": | |||
| leader_position = event["value"] | |||
| if not leader_initialized: | |||
| leader_initialized = True | |||
| pwm_goal = logical_to_pwm_with_offset_arrow( | |||
| leader_position.filter(initial_mask), | |||
| logical_leader_initial_goal, | |||
| leader_control, | |||
| ) | |||
| node.send_output("leader_goal", pwm_goal, event["metadata"]) | |||
| if not follower_initialized: | |||
| continue | |||
| leader_position = pwm_to_logical_arrow(leader_position, leader_control) | |||
| interpolation = pa.array([1, 1, 1, 1, 1, 700 / 450], type=pa.float32()) | |||
| logical_goal = wrap_joints_and_values( | |||
| leader_position.field("joints"), | |||
| pc.multiply(leader_position.field("values"), interpolation), | |||
| ) | |||
| pwm_goal = logical_to_pwm_with_offset_arrow( | |||
| follower_position, logical_goal, follower_control | |||
| ) | |||
| node.send_output("follower_goal", pwm_goal, event["metadata"]) | |||
| elif event_id == "follower_position": | |||
| follower_position = event["value"] | |||
| follower_initialized = True | |||
| elif event_type == "ERROR": | |||
| print("[lcr-to-lcr] error: ", event["error"]) | |||
| break | |||
| if __name__ == "__main__": | |||
| main() | |||
+ 114
- 0
examples/alexk-lcr/nodes/interpolate_lcr_to_record.py
View File
| @@ -0,0 +1,114 @@ | |||
| import os | |||
| import argparse | |||
| import json | |||
| import pyarrow as pa | |||
| import pyarrow.compute as pc | |||
| from dora import Node | |||
| from pwm_position_control.load import load_control_table_from_json_conversion_tables | |||
| from pwm_position_control.transform import ( | |||
| wrap_joints_and_values, | |||
| pwm_to_logical_arrow, | |||
| ) | |||
| def main(): | |||
| parser = argparse.ArgumentParser( | |||
| description="Interpolation LCR Node: This Dora node is used to calculates appropriate goal positions for the " | |||
| "LCR followers knowing a Leader position and Follower position." | |||
| ) | |||
| parser.add_argument( | |||
| "--name", | |||
| type=str, | |||
| required=False, | |||
| help="The name of the node in the dataflow.", | |||
| default="lcr-to-record", | |||
| ) | |||
| parser.add_argument( | |||
| "--leader-control", | |||
| type=str, | |||
| help="The configuration file for controlling the leader.", | |||
| default=None, | |||
| ) | |||
| parser.add_argument( | |||
| "--follower-control", | |||
| type=str, | |||
| help="The configuration file for controlling the follower.", | |||
| default=None, | |||
| ) | |||
| args = parser.parse_args() | |||
| if not os.environ.get("LEADER_CONTROL") and args.leader_control is None: | |||
| raise ValueError( | |||
| "The leader control is not set. Please set the configuration of the leader in the environment variables or " | |||
| "as an argument." | |||
| ) | |||
| if not os.environ.get("FOLLOWER_CONTROL") and args.follower_control is None: | |||
| raise ValueError( | |||
| "The follower control is not set. Please set the configuration of the follower in the environment " | |||
| "variables or as an argument." | |||
| ) | |||
| with open( | |||
| os.environ.get("LEADER_CONTROL") | |||
| if args.leader_control is None | |||
| else args.leader_control | |||
| ) as file: | |||
| leader_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables(leader_control, leader_control) | |||
| with open( | |||
| os.environ.get("FOLLOWER_CONTROL") | |||
| if args.follower_control is None | |||
| else args.follower_control | |||
| ) as file: | |||
| follower_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables( | |||
| follower_control, follower_control | |||
| ) | |||
| node = Node(args.name) | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| event_id = event["id"] | |||
| if event_id == "leader_position": | |||
| leader_position = event["value"] | |||
| leader_position = pwm_to_logical_arrow(leader_position, leader_control) | |||
| interpolation = pa.array([1, 1, 1, 1, 1, 700 / 450], type=pa.float32()) | |||
| logical_goal = wrap_joints_and_values( | |||
| leader_position.field("joints"), | |||
| pc.multiply(leader_position.field("values"), interpolation), | |||
| ) | |||
| node.send_output("logical_goal", logical_goal, event["metadata"]) | |||
| elif event_id == "follower_position": | |||
| follower_position = event["value"] | |||
| follower_position = pwm_to_logical_arrow( | |||
| follower_position, follower_control | |||
| ) | |||
| node.send_output( | |||
| "logical_position", follower_position, event["metadata"] | |||
| ) | |||
| elif event_type == "ERROR": | |||
| print("[lcr-to-record] error: ", event["error"]) | |||
| break | |||
| if __name__ == "__main__": | |||
| main() | |||
+ 133
- 0
examples/alexk-lcr/nodes/interpolate_lcr_to_simu_lcr.py
View File
| @@ -0,0 +1,133 @@ | |||
| import os | |||
| import argparse | |||
| import json | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| import pyarrow.compute as pc | |||
| from dora import Node | |||
| from pwm_position_control.load import load_control_table_from_json_conversion_tables | |||
| from pwm_position_control.transform import ( | |||
| wrap_joints_and_values, | |||
| pwm_to_logical_arrow, | |||
| logical_to_pwm_with_offset_arrow, | |||
| ) | |||
| def main(): | |||
| parser = argparse.ArgumentParser( | |||
| description="Interpolation LCR Node: This Dora node is used to calculates appropriate goal positions for the " | |||
| "LCR followers knowing a Leader position and Follower position." | |||
| ) | |||
| parser.add_argument( | |||
| "--name", | |||
| type=str, | |||
| required=False, | |||
| help="The name of the node in the dataflow.", | |||
| default="lcr-to-simu-lcr", | |||
| ) | |||
| parser.add_argument( | |||
| "--leader-control", | |||
| type=str, | |||
| help="The configuration file for controlling the leader.", | |||
| default=None, | |||
| ) | |||
| args = parser.parse_args() | |||
| if not os.environ.get("LEADER_CONTROL") and args.leader_control is None: | |||
| raise ValueError( | |||
| "The leader control is not set. Please set the configuration of the leader in the environment variables or " | |||
| "as an argument." | |||
| ) | |||
| with open( | |||
| os.environ.get("LEADER_CONTROL") | |||
| if args.leader_control is None | |||
| else args.leader_control | |||
| ) as file: | |||
| leader_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables(leader_control, leader_control) | |||
| initial_mask = [ | |||
| True if leader_control[joint]["goal_position"] is not None else False | |||
| for joint in leader_control.keys() | |||
| ] | |||
| logical_leader_initial_goal = wrap_joints_and_values( | |||
| [ | |||
| joint | |||
| for joint in leader_control.keys() | |||
| if leader_control[joint]["goal_position"] is not None | |||
| ], | |||
| [ | |||
| leader_control[joint]["goal_position"] | |||
| for joint in leader_control.keys() | |||
| if leader_control[joint]["goal_position"] is not None | |||
| ], | |||
| ) | |||
| node = Node(args.name) | |||
| leader_initialized = False | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| event_id = event["id"] | |||
| if event_id == "leader_position": | |||
| leader_position = event["value"] | |||
| if not leader_initialized: | |||
| leader_initialized = True | |||
| physical_goal = logical_to_pwm_with_offset_arrow( | |||
| leader_position.filter(initial_mask), | |||
| logical_leader_initial_goal, | |||
| leader_control, | |||
| ) | |||
| node.send_output("leader_goal", physical_goal, event["metadata"]) | |||
| leader_position = pwm_to_logical_arrow(leader_position, leader_control) | |||
| interpolation_m = pa.array( | |||
| [ | |||
| np.pi / 180, | |||
| np.pi / 180, | |||
| np.pi / 180, | |||
| np.pi / 180, | |||
| np.pi / 180, | |||
| np.pi / 180 * 700 / 450, | |||
| ], | |||
| type=pa.float32(), | |||
| ) | |||
| interpolation_a = pa.array([0, 0, 0, 0, 90, 0], type=pa.float32()) | |||
| logical_goal = wrap_joints_and_values( | |||
| pa.array( | |||
| [ | |||
| joint.as_py() + "_joint" | |||
| for joint in leader_position.field("joints") | |||
| ] | |||
| ), | |||
| pc.multiply( | |||
| pc.add(leader_position.field("values"), interpolation_a), | |||
| interpolation_m, | |||
| ), | |||
| ) | |||
| node.send_output("follower_goal", logical_goal, event["metadata"]) | |||
| elif event_type == "ERROR": | |||
| print("[lcr-to-simu] error: ", event["error"]) | |||
| break | |||
| if __name__ == "__main__": | |||
| main() | |||
+ 83
- 0
examples/alexk-lcr/nodes/interpolate_replay_to_lcr.py
View File
| @@ -0,0 +1,83 @@ | |||
| import os | |||
| import argparse | |||
| import json | |||
| from dora import Node | |||
| from pwm_position_control.load import load_control_table_from_json_conversion_tables | |||
| from pwm_position_control.transform import logical_to_pwm_with_offset_arrow | |||
| def main(): | |||
| parser = argparse.ArgumentParser( | |||
| description="Interpolation LCR Node: This Dora node is used to calculates appropriate goal positions for the " | |||
| "LCR followers knowing a Leader position and Follower position." | |||
| ) | |||
| parser.add_argument( | |||
| "--name", | |||
| type=str, | |||
| required=False, | |||
| help="The name of the node in the dataflow.", | |||
| default="replay-to-lcr", | |||
| ) | |||
| parser.add_argument( | |||
| "--follower-control", | |||
| type=str, | |||
| help="The configuration file for controlling the follower.", | |||
| default=None, | |||
| ) | |||
| args = parser.parse_args() | |||
| if not os.environ.get("FOLLOWER_CONTROL") and args.follower_control is None: | |||
| raise ValueError( | |||
| "The follower control is not set. Please set the configuration of the follower in the environment " | |||
| "variables or as an argument." | |||
| ) | |||
| with open( | |||
| os.environ.get("FOLLOWER_CONTROL") | |||
| if args.follower_control is None | |||
| else args.follower_control | |||
| ) as file: | |||
| follower_control = json.load(file) | |||
| load_control_table_from_json_conversion_tables( | |||
| follower_control, follower_control | |||
| ) | |||
| node = Node(args.name) | |||
| follower_initialized = False | |||
| follower_position = None | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| event_id = event["id"] | |||
| if event_id == "leader_position": | |||
| leader_position = event["value"] | |||
| if not follower_initialized: | |||
| continue | |||
| physical_goal = logical_to_pwm_with_offset_arrow( | |||
| follower_position, leader_position, follower_control | |||
| ) | |||
| node.send_output("follower_goal", physical_goal, event["metadata"]) | |||
| elif event_id == "follower_position": | |||
| follower_position = event["value"] | |||
| follower_initialized = True | |||
| elif event_type == "ERROR": | |||
| print("[replay-to-lcr] error: ", event["error"]) | |||
| break | |||
| if __name__ == "__main__": | |||
| main() | |||
+ 64
- 0
examples/aloha/ASSEMBLING.md
View File
| @@ -0,0 +1,64 @@ | |||
| # Dora pipeline Robots | |||
| Aloha is a bi manual robot that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate arms, cameras, and record/replay episodes with LeRobot. | |||
| - To check if the robot is connected, install dynamixel | |||
| wizard [here](https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/) | |||
| - Dynamixel wizard is a very helpful debugging tool that connects to individual motors of the robot. It allows | |||
| things such as rebooting the motor (very useful!), torque on/off, and sending commands. | |||
| However, it has no knowledge about the kinematics of the robot, so be careful about collisions. | |||
| The robot _will_ collapse if motors are torque off i.e. there is no automatically engaged brakes in joints. | |||
| - Open Dynamixel wizard, go into `options` and select: | |||
| - Protocol 2.0 | |||
| - All ports | |||
| - 1000000 bps | |||
| - ID range from 0-10 | |||
| - Note: repeat above everytime before you scan. | |||
| - Then hit `Scan`. There should be 4 devices showing up, each with 9 motors. | |||
| - One issue that arises is the port each robot binds to can change over time, e.g. a robot that | |||
| is initially `ttyUSB0` might suddenly become `ttyUSB5`. To resolve this, we bind each robot to a fixed symlink | |||
| port with the following mapping: | |||
| - `ttyDXL_master_right`: right master robot (master: the robot that the operator would be holding) | |||
| - `ttyDXL_puppet_right`: right puppet robot (puppet: the robot that performs the task) | |||
| - `ttyDXL_master_left`: left master robot | |||
| - `ttyDXL_puppet_left`: left puppet robot | |||
| - Take `ttyDXL_master_right`: right master robot as an example: | |||
| 1. Find the port that the right master robot is currently binding to, e.g. `ttyUSB0` | |||
| 2. run `udevadm info --name=/dev/ttyUSB0 --attribute-walk | grep serial` to obtain the serial number. Use the first | |||
| one that shows up, the format should look similar to `FT6S4DSP`. | |||
| 3. `sudo vim /etc/udev/rules.d/99-fixed-interbotix-udev.rules` and add the following line: | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="<serial number here>", ENV{ID_MM_DEVICE_IGNORE}="1", | |||
| ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_master_right" | |||
| 4. This will make sure the right master robot is _always_ binding to `ttyDXL_master_right` | |||
| 5. Repeat with the rest of 3 arms. | |||
| > You have an example of the given rules in `hardware_config.yml`. | |||
| ```bash | |||
| cd dora | |||
| sudo cp examples/aloha/hardware_config/99-interbotix-udev.rules /etc/udev/rules.d | |||
| sudo cp examples/aloha/hardware_config/99-fixed-interbotix-udev.rules /etc/udev/rules.d | |||
| ``` | |||
| - To apply the changes, run `sudo udevadm control --reload && sudo udevadm trigger` | |||
| - If successful, you should be able to find `ttyDXL*` in your `/dev` | |||
| ## Documentation | |||
| https://github.com/Interbotix/interbotix_ros_toolboxes/blob/humble/interbotix_xs_toolbox/interbotix_xs_modules/interbotix_xs_modules/xs_robot/core.py | |||
| https://github.com/Interbotix/interbotix_ros_toolboxes/blob/c187bcea89b60391244bb19943ebd78f770aa975/interbotix_xs_toolbox/interbotix_xs_modules/interbotix_xs_modules/xs_robot/core.py#L380-L398 | |||
| ## Acknowledgement | |||
| This work is inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance | |||
| improvement. | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 95
- 0
examples/aloha/CONFIGURING.md
View File
| @@ -0,0 +1,95 @@ | |||
| # Dora pipeline Robots | |||
| Aloha is a bi manual robot that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate arms, cameras, and record/replay episodes with LeRobot. | |||
| ## Configuring | |||
| Once you have assembled the robot, and installed the required software, you can configure the robot. It's essential to | |||
| configure it | |||
| correctly for the robot to work as expected. Here are the reasons why you need to configure the robot: | |||
| - You may have done some 'mistakes' during the assembly, like inverting the motors, or changing the offsets by rotating | |||
| the motors before assembling the robot. So your configuration will be different from the one we used to record the | |||
| data set. | |||
| - The recording pipeline needs to know the position of the motors to record the data set correctly. If the motors are | |||
| calibrated differently, the data set will be incorrect. | |||
| **Please read the instructions carefully before configuring the robot.** | |||
| The first thing to do is to configure the Servo BUS: | |||
| - Setting all the servos to the same baud rate (1M). | |||
| - Setting the ID of the servos from the base (1) to the gripper (9) for the Follower and Leader arms. | |||
| Those steps can be done using the official wizard provided by the | |||
| manufacturer [ROBOTICS](https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/). | |||
| After that, you need to configure the homing offsets and drive mode to have the same behavior for every user. We | |||
| recommend using our on-board tool to set all of that automatically: | |||
| - Connect the Follower arm to your computer. | |||
| - Retrieve the device port from the official wizard. | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./examples/aloha/configure.py --port /dev/ttyUSB0 --follower --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
| **Note:** The configuration tool will disable all torque so you can move the arm freely to the Position 1. | |||
| **Note:** You will be asked to set the arm in two different positions. The two positions are: | |||
| TODO: image for aloha | |||
| **Node:** You will be asked the path of the configuration file, you can press enter to use the default one. | |||
| - Repeat the same steps for the Leader arm: | |||
| ```bash | |||
| python ./examples/aloha/configure.py --port /dev/ttyUSB1 --leader --left # (or right) | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB1` to the device port you retrieved from the official wizard (like `COM4` on Windows). | |||
| **Note:** The configuration tool will disable all torque so you can move the arm freely to the Position 1. | |||
| **Node:** You will be asked the path of the configuration file, you can press enter to use the default one. | |||
| After following the guide, you should have the following configuration: | |||
| TODO: image for aloha | |||
| This configuration has to be exported into environment variables inside the graph file. Here is an example of the | |||
| configuration: | |||
| ```YAML | |||
| nodes: | |||
| - id: aloha-follower | |||
| env: | |||
| PORT: /dev/ttyUSB0 | |||
| CONFIG: ../configs/follower.left.json # relative path to `./examples/aloha/configs/follower.json` | |||
| - id: aloha-to-aloha | |||
| env: | |||
| LEADER_CONTROL: ../configs/leader.left.json | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| ``` | |||
| ## Acknowledgement | |||
| This work is inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance | |||
| improvement. | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 87
- 0
examples/aloha/INSTALLATION.md
View File
| @@ -0,0 +1,87 @@ | |||
| # Dora pipeline Robots | |||
| Aloha is a bi manual robot that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate arms, cameras, and record/replay episodes with LeRobot. | |||
| ## Installation | |||
| Dataflow-oriented robotic application (Dora) is a framework that makes creation of robotic applications fast and simple. | |||
| See [Dora repository](https://github.com/dora-rs/dora). | |||
| **Please read the instructions carefully before installing the required software and environment to run the robot.** | |||
| You must install Dora before attempting to run theAloha Robot pipeline. Here are the steps to install Dora: | |||
| - Install Rust by following the instructions at [Rustup](https://rustup.rs/). (You may need to install Visual Studio C++ | |||
| build tools on Windows.) | |||
| - Install Dora by running the following command: | |||
| ```bash | |||
| cargo install dora-cli | |||
| ``` | |||
| Now you're ready to run Rust dataflow applications! We decided to only make Python dataflow for Aloha Robot, so | |||
| you may need to setup your Python environment: | |||
| - Install Python 3.12 or later by following the instructions at [Python](https://www.python.org/downloads/). | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| the command `whereis python3` on Linux, on default for Windows it's located | |||
| in `C:\Users\<User>\AppData\Local\Programs\Python\Python3.12\python.exe)`): | |||
| ```bash | |||
| path_to_your_python3_executable -m venv venv | |||
| ``` | |||
| - Activate the virtual environment and install the required Python packages by running the following command: | |||
| ```bash | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r examples/so100/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r examples/aloha/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
| have to activate | |||
| your custom python environment before running `dora up && dora start [graph].yml`. | |||
| In order to record episodes, you need ffmpeg installed on your system. You can download it from | |||
| the [official website](https://ffmpeg.org/download.html). If you're on Windows, you can download the latest build | |||
| from [here](https://www.gyan.dev/ffmpeg/builds/). You can | |||
| extract the zip file and add the `bin` folder to your PATH. | |||
| If you're on Linux, you can install ffmpeg using the package manager of your distribution. ( | |||
| e.g `sudo apt install ffmpeg` on Ubuntu, `brew install ffmpeg` on macOS) | |||
| ## Acknowledgement | |||
| This work is inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance | |||
| improvement. | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 42
- 0
examples/aloha/README.md
View File
| @@ -0,0 +1,42 @@ | |||
| # Dora pipeline Robots | |||
| Aloha is a bi manual robot that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate arms, cameras, and record/replay episodes with LeRobot. | |||
| ## Assembling | |||
| Check the [ASSEMBLING.md](ASSEMBLING.md) file for instructions on how to assemble the robot. | |||
| ## Installation | |||
| Check the [INSTALLATION.md](INSTALLATION.md) file for instructions on how to install the required software and | |||
| environment | |||
| to run the robot. | |||
| ## Configuring | |||
| Check the [CONFIGURING.md](CONFIGURING.md) file for instructions on how to configure the robot to record episodes for | |||
| LeRobot and teleoperate the robot. | |||
| ## Recording | |||
| It's probably better to check the [examples](#examples) below before trying to record episodes. It will give you a | |||
| better | |||
| understanding of how Dora works. | |||
| Check the [RECORDING.md](RECORDING.md) file for instructions on how to record episodes for LeRobot. | |||
| ## Examples | |||
| There are also some other example applications in the `graphs` folder. Have fun! | |||
| Here is a list of the available examples: | |||
| ## Acknowledgement | |||
| This work is inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance | |||
| improvement. | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 17
- 0
examples/aloha/RECORDING.md
View File
| @@ -0,0 +1,17 @@ | |||
| # Dora pipeline Robots | |||
| Aloha is a bi manual robot that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate arms, cameras, and record/replay episodes with LeRobot. | |||
| ## Recording | |||
| There is not a recording section for the robot at the moment. | |||
| ## Acknowledgement | |||
| This work is inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance | |||
| improvement. | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 13
- 0
examples/aloha/benchmark/python/README.md
View File
| @@ -0,0 +1,13 @@ | |||
| # Python API Powered Aloha inspired by [AlexanderKoch-Koch/low_cost_robot](https://github.com/AlexanderKoch-Koch/low_cost_robot) | |||
| ## Getting started | |||
| Modify port and servo motor configuration. | |||
| ```bash | |||
| python python teleoperate_real_robot.py | |||
| ``` | |||
| ## Results | |||
| On my run, I get about 50Hz teleoperation although the python calls does not block for as long. | |||
+ 325
- 0
examples/aloha/benchmark/python/dynamixel.py
View File
| @@ -0,0 +1,325 @@ | |||
| from __future__ import annotations | |||
| import math | |||
| import os | |||
| from dynamixel_sdk import * # Uses Dynamixel SDK library | |||
| from dataclasses import dataclass | |||
| import enum | |||
| import time | |||
| class ReadAttribute(enum.Enum): | |||
| TEMPERATURE = 146 | |||
| VOLTAGE = 145 | |||
| VELOCITY = 128 | |||
| POSITION = 132 | |||
| CURRENT = 126 | |||
| PWM = 124 | |||
| HARDWARE_ERROR_STATUS = 70 | |||
| HOMING_OFFSET = 20 | |||
| BAUDRATE = 8 | |||
| class OperatingMode(enum.Enum): | |||
| VELOCITY = 1 | |||
| POSITION = 3 | |||
| CURRENT_CONTROLLED_POSITION = 5 | |||
| PWM = 16 | |||
| UNKNOWN = -1 | |||
| class Dynamixel: | |||
| ADDR_TORQUE_ENABLE = 64 | |||
| ADDR_GOAL_POSITION = 116 | |||
| ADDR_VELOCITY_LIMIT = 44 | |||
| ADDR_GOAL_PWM = 100 | |||
| OPERATING_MODE_ADDR = 11 | |||
| POSITION_I = 82 | |||
| POSITION_P = 84 | |||
| ADDR_ID = 7 | |||
| @dataclass | |||
| class Config: | |||
| def instantiate(self): | |||
| return Dynamixel(self) | |||
| baudrate: int = 57600 | |||
| protocol_version: float = 2.0 | |||
| device_name: str = "" # /dev/tty.usbserial-1120' | |||
| dynamixel_id: int = 1 | |||
| def __init__(self, config: Config): | |||
| self.config = config | |||
| self.connect() | |||
| def connect(self): | |||
| if self.config.device_name == "": | |||
| for port_name in os.listdir("/dev"): | |||
| if "ttyUSB" in port_name or "ttyACM" in port_name: | |||
| self.config.device_name = "/dev/" + port_name | |||
| print(f"using device {self.config.device_name}") | |||
| self.portHandler = PortHandler(self.config.device_name) | |||
| # self.portHandler.LA | |||
| self.packetHandler = PacketHandler(self.config.protocol_version) | |||
| if not self.portHandler.openPort(): | |||
| raise Exception(f"Failed to open port {self.config.device_name}") | |||
| if not self.portHandler.setBaudRate(self.config.baudrate): | |||
| raise Exception(f"failed to set baudrate to {self.config.baudrate}") | |||
| # self.operating_mode = OperatingMode.UNKNOWN | |||
| # self.torque_enabled = False | |||
| # self._disable_torque() | |||
| self.operating_modes = [None for _ in range(32)] | |||
| self.torque_enabled = [None for _ in range(32)] | |||
| return True | |||
| def disconnect(self): | |||
| self.portHandler.closePort() | |||
| def set_goal_position(self, motor_id, goal_position): | |||
| # if self.operating_modes[motor_id] is not OperatingMode.POSITION: | |||
| # self._disable_torque(motor_id) | |||
| # self.set_operating_mode(motor_id, OperatingMode.POSITION) | |||
| # if not self.torque_enabled[motor_id]: | |||
| # self._enable_torque(motor_id) | |||
| # self._enable_torque(motor_id) | |||
| dxl_comm_result, dxl_error = self.packetHandler.write4ByteTxRx( | |||
| self.portHandler, motor_id, self.ADDR_GOAL_POSITION, goal_position | |||
| ) | |||
| # self._process_response(dxl_comm_result, dxl_error) | |||
| # print(f'set position of motor {motor_id} to {goal_position}') | |||
| def set_pwm_value(self, motor_id: int, pwm_value, tries=3): | |||
| if self.operating_modes[motor_id] is not OperatingMode.PWM: | |||
| self._disable_torque(motor_id) | |||
| self.set_operating_mode(motor_id, OperatingMode.PWM) | |||
| if not self.torque_enabled[motor_id]: | |||
| self._enable_torque(motor_id) | |||
| # print(f'enabling torque') | |||
| dxl_comm_result, dxl_error = self.packetHandler.write2ByteTxRx( | |||
| self.portHandler, motor_id, self.ADDR_GOAL_PWM, pwm_value | |||
| ) | |||
| # self._process_response(dxl_comm_result, dxl_error) | |||
| # print(f'set pwm of motor {motor_id} to {pwm_value}') | |||
| if dxl_comm_result != COMM_SUCCESS: | |||
| if tries <= 1: | |||
| raise ConnectionError( | |||
| f"dxl_comm_result: {self.packetHandler.getTxRxResult(dxl_comm_result)}" | |||
| ) | |||
| else: | |||
| print( | |||
| f"dynamixel pwm setting failure trying again with {tries - 1} tries" | |||
| ) | |||
| self.set_pwm_value(motor_id, pwm_value, tries=tries - 1) | |||
| elif dxl_error != 0: | |||
| print(f"dxl error {dxl_error}") | |||
| raise ConnectionError( | |||
| f"dynamixel error: {self.packetHandler.getTxRxResult(dxl_error)}" | |||
| ) | |||
| def read_temperature(self, motor_id: int): | |||
| return self._read_value(motor_id, ReadAttribute.TEMPERATURE, 1) | |||
| def read_velocity(self, motor_id: int): | |||
| pos = self._read_value(motor_id, ReadAttribute.VELOCITY, 4) | |||
| if pos > 2**31: | |||
| pos -= 2**32 | |||
| # print(f'read position {pos} for motor {motor_id}') | |||
| return pos | |||
| def read_position(self, motor_id: int): | |||
| pos = self._read_value(motor_id, ReadAttribute.POSITION, 4) | |||
| if pos > 2**31: | |||
| pos -= 2**32 | |||
| # print(f'read position {pos} for motor {motor_id}') | |||
| return pos | |||
| def read_position_degrees(self, motor_id: int) -> float: | |||
| return (self.read_position(motor_id) / 4096) * 360 | |||
| def read_position_radians(self, motor_id: int) -> float: | |||
| return (self.read_position(motor_id) / 4096) * 2 * math.pi | |||
| def read_current(self, motor_id: int): | |||
| current = self._read_value(motor_id, ReadAttribute.CURRENT, 2) | |||
| if current > 2**15: | |||
| current -= 2**16 | |||
| return current | |||
| def read_present_pwm(self, motor_id: int): | |||
| return self._read_value(motor_id, ReadAttribute.PWM, 2) | |||
| def read_hardware_error_status(self, motor_id: int): | |||
| return self._read_value(motor_id, ReadAttribute.HARDWARE_ERROR_STATUS, 1) | |||
| def set_id(self, old_id, new_id, use_broadcast_id: bool = False): | |||
| """ | |||
| sets the id of the dynamixel servo | |||
| @param old_id: current id of the servo | |||
| @param new_id: new id | |||
| @param use_broadcast_id: set ids of all connected dynamixels if True. | |||
| If False, change only servo with self.config.id | |||
| @return: | |||
| """ | |||
| if use_broadcast_id: | |||
| current_id = 254 | |||
| else: | |||
| current_id = old_id | |||
| dxl_comm_result, dxl_error = self.packetHandler.write1ByteTxRx( | |||
| self.portHandler, current_id, self.ADDR_ID, new_id | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, old_id) | |||
| self.config.id = id | |||
| def _enable_torque(self, motor_id): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write1ByteTxRx( | |||
| self.portHandler, motor_id, self.ADDR_TORQUE_ENABLE, 1 | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| self.torque_enabled[motor_id] = True | |||
| def _disable_torque(self, motor_id): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write1ByteTxRx( | |||
| self.portHandler, motor_id, self.ADDR_TORQUE_ENABLE, 0 | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| self.torque_enabled[motor_id] = False | |||
| def _process_response(self, dxl_comm_result: int, dxl_error: int, motor_id: int): | |||
| if dxl_comm_result != COMM_SUCCESS: | |||
| raise ConnectionError( | |||
| f"dxl_comm_result for motor {motor_id}: {self.packetHandler.getTxRxResult(dxl_comm_result)}" | |||
| ) | |||
| elif dxl_error != 0: | |||
| print(f"dxl error {dxl_error}") | |||
| raise ConnectionError( | |||
| f"dynamixel error for motor {motor_id}: {self.packetHandler.getTxRxResult(dxl_error)}" | |||
| ) | |||
| def set_operating_mode(self, motor_id: int, operating_mode: OperatingMode): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write2ByteTxRx( | |||
| self.portHandler, motor_id, self.OPERATING_MODE_ADDR, operating_mode.value | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| self.operating_modes[motor_id] = operating_mode | |||
| def set_pwm_limit(self, motor_id: int, limit: int): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write2ByteTxRx( | |||
| self.portHandler, motor_id, 36, limit | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| def set_velocity_limit(self, motor_id: int, velocity_limit): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write4ByteTxRx( | |||
| self.portHandler, motor_id, self.ADDR_VELOCITY_LIMIT, velocity_limit | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| def set_P(self, motor_id: int, P: int): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write2ByteTxRx( | |||
| self.portHandler, motor_id, self.POSITION_P, P | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| def set_I(self, motor_id: int, I: int): | |||
| dxl_comm_result, dxl_error = self.packetHandler.write2ByteTxRx( | |||
| self.portHandler, motor_id, self.POSITION_I, I | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| def read_home_offset(self, motor_id: int): | |||
| self._disable_torque(motor_id) | |||
| # dxl_comm_result, dxl_error = self.packetHandler.write4ByteTxRx(self.portHandler, motor_id, | |||
| # ReadAttribute.HOMING_OFFSET.value, home_position) | |||
| home_offset = self._read_value(motor_id, ReadAttribute.HOMING_OFFSET, 4) | |||
| # self._process_response(dxl_comm_result, dxl_error) | |||
| self._enable_torque(motor_id) | |||
| return home_offset | |||
| def set_home_offset(self, motor_id: int, home_position: int): | |||
| self._disable_torque(motor_id) | |||
| dxl_comm_result, dxl_error = self.packetHandler.write4ByteTxRx( | |||
| self.portHandler, motor_id, ReadAttribute.HOMING_OFFSET.value, home_position | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| self._enable_torque(motor_id) | |||
| def set_baudrate(self, motor_id: int, baudrate): | |||
| # translate baudrate into dynamixel baudrate setting id | |||
| if baudrate == 57600: | |||
| baudrate_id = 1 | |||
| elif baudrate == 1_000_000: | |||
| baudrate_id = 3 | |||
| elif baudrate == 2_000_000: | |||
| baudrate_id = 4 | |||
| elif baudrate == 3_000_000: | |||
| baudrate_id = 5 | |||
| elif baudrate == 4_000_000: | |||
| baudrate_id = 6 | |||
| else: | |||
| raise Exception("baudrate not implemented") | |||
| self._disable_torque(motor_id) | |||
| dxl_comm_result, dxl_error = self.packetHandler.write1ByteTxRx( | |||
| self.portHandler, motor_id, ReadAttribute.BAUDRATE.value, baudrate_id | |||
| ) | |||
| self._process_response(dxl_comm_result, dxl_error, motor_id) | |||
| def _read_value(self, motor_id, attribute: ReadAttribute, num_bytes: int, tries=10): | |||
| try: | |||
| if num_bytes == 1: | |||
| value, dxl_comm_result, dxl_error = self.packetHandler.read1ByteTxRx( | |||
| self.portHandler, motor_id, attribute.value | |||
| ) | |||
| elif num_bytes == 2: | |||
| value, dxl_comm_result, dxl_error = self.packetHandler.read2ByteTxRx( | |||
| self.portHandler, motor_id, attribute.value | |||
| ) | |||
| elif num_bytes == 4: | |||
| value, dxl_comm_result, dxl_error = self.packetHandler.read4ByteTxRx( | |||
| self.portHandler, motor_id, attribute.value | |||
| ) | |||
| except Exception: | |||
| if tries == 0: | |||
| raise Exception | |||
| else: | |||
| return self._read_value(motor_id, attribute, num_bytes, tries=tries - 1) | |||
| if dxl_comm_result != COMM_SUCCESS: | |||
| if tries <= 1: | |||
| # print("%s" % self.packetHandler.getTxRxResult(dxl_comm_result)) | |||
| raise ConnectionError( | |||
| f"dxl_comm_result {dxl_comm_result} for servo {motor_id} value {value}" | |||
| ) | |||
| else: | |||
| print( | |||
| f"dynamixel read failure for servo {motor_id} trying again with {tries - 1} tries" | |||
| ) | |||
| time.sleep(0.02) | |||
| return self._read_value(motor_id, attribute, num_bytes, tries=tries - 1) | |||
| elif ( | |||
| dxl_error != 0 | |||
| ): # # print("%s" % self.packetHandler.getRxPacketError(dxl_error)) | |||
| # raise ConnectionError(f'dxl_error {dxl_error} binary ' + "{0:b}".format(37)) | |||
| if tries == 0 and dxl_error != 128: | |||
| raise Exception( | |||
| f"Failed to read value from motor {motor_id} error is {dxl_error}" | |||
| ) | |||
| else: | |||
| return self._read_value(motor_id, attribute, num_bytes, tries=tries - 1) | |||
| return value | |||
| def set_home_position(self, motor_id: int): | |||
| print(f"setting home position for motor {motor_id}") | |||
| self.set_home_offset(motor_id, 0) | |||
| current_position = self.read_position(motor_id) | |||
| print(f"position before {current_position}") | |||
| self.set_home_offset(motor_id, -current_position) | |||
| # dynamixel.set_home_offset(motor_id, -4096) | |||
| # dynamixel.set_home_offset(motor_id, -4294964109) | |||
| current_position = self.read_position(motor_id) | |||
| # print(f'signed position {current_position - 2** 32}') | |||
| print(f"position after {current_position}") | |||
+ 191
- 0
examples/aloha/benchmark/python/robot.py
View File
| @@ -0,0 +1,191 @@ | |||
| import numpy as np | |||
| from dynamixel import Dynamixel, OperatingMode, ReadAttribute | |||
| import time | |||
| from dynamixel_sdk import ( | |||
| GroupSyncRead, | |||
| GroupSyncWrite, | |||
| DXL_LOBYTE, | |||
| DXL_HIBYTE, | |||
| DXL_LOWORD, | |||
| DXL_HIWORD, | |||
| ) | |||
| from enum import Enum, auto | |||
| from typing import Union | |||
| class MotorControlType(Enum): | |||
| PWM = auto() | |||
| POSITION_CONTROL = auto() | |||
| DISABLED = auto() | |||
| UNKNOWN = auto() | |||
| class Robot: | |||
| # def __init__(self, device_name: str, baudrate=1_000_000, servo_ids=[1, 2, 3, 4, 5]): | |||
| def __init__(self, dynamixel, baudrate=1_000_000, servo_ids=[1, 2, 3, 4, 5]): | |||
| self.servo_ids = servo_ids | |||
| self.dynamixel = dynamixel | |||
| # self.dynamixel = Dynamixel.Config(baudrate=baudrate, device_name=device_name).instantiate() | |||
| self.position_reader = GroupSyncRead( | |||
| self.dynamixel.portHandler, | |||
| self.dynamixel.packetHandler, | |||
| ReadAttribute.POSITION.value, | |||
| 4, | |||
| ) | |||
| for id in self.servo_ids: | |||
| self.position_reader.addParam(id) | |||
| self.velocity_reader = GroupSyncRead( | |||
| self.dynamixel.portHandler, | |||
| self.dynamixel.packetHandler, | |||
| ReadAttribute.VELOCITY.value, | |||
| 4, | |||
| ) | |||
| for id in self.servo_ids: | |||
| self.velocity_reader.addParam(id) | |||
| self.pos_writer = GroupSyncWrite( | |||
| self.dynamixel.portHandler, | |||
| self.dynamixel.packetHandler, | |||
| self.dynamixel.ADDR_GOAL_POSITION, | |||
| 4, | |||
| ) | |||
| for id in self.servo_ids: | |||
| self.pos_writer.addParam(id, [2048]) | |||
| self.pwm_writer = GroupSyncWrite( | |||
| self.dynamixel.portHandler, | |||
| self.dynamixel.packetHandler, | |||
| self.dynamixel.ADDR_GOAL_PWM, | |||
| 2, | |||
| ) | |||
| for id in self.servo_ids: | |||
| self.pwm_writer.addParam(id, [2048]) | |||
| self._disable_torque() | |||
| self.motor_control_state = MotorControlType.DISABLED | |||
| def read_position(self, tries=2): | |||
| """ | |||
| Reads the joint positions of the robot. 2048 is the center position. 0 and 4096 are 180 degrees in each direction. | |||
| :param tries: maximum number of tries to read the position | |||
| :return: list of joint positions in range [0, 4096] | |||
| """ | |||
| result = self.position_reader.txRxPacket() | |||
| if result != 0: | |||
| if tries > 0: | |||
| return self.read_position(tries=tries - 1) | |||
| else: | |||
| print(f"failed to read position!!!!!!!!!!!!!!!!!!!!!!!!!!!!!") | |||
| positions = [] | |||
| for id in self.servo_ids: | |||
| position = self.position_reader.getData(id, ReadAttribute.POSITION.value, 4) | |||
| if position > 2**31: | |||
| position -= 2**32 | |||
| positions.append(position) | |||
| return positions | |||
| def read_velocity(self): | |||
| """ | |||
| Reads the joint velocities of the robot. | |||
| :return: list of joint velocities, | |||
| """ | |||
| self.velocity_reader.txRxPacket() | |||
| velocties = [] | |||
| for id in self.servo_ids: | |||
| velocity = self.velocity_reader.getData(id, ReadAttribute.VELOCITY.value, 4) | |||
| if velocity > 2**31: | |||
| velocity -= 2**32 | |||
| velocties.append(velocity) | |||
| return velocties | |||
| def set_goal_pos(self, action): | |||
| """ | |||
| :param action: list or numpy array of target joint positions in range [0, 4096] | |||
| """ | |||
| if not self.motor_control_state is MotorControlType.POSITION_CONTROL: | |||
| self._set_position_control() | |||
| for i, motor_id in enumerate(self.servo_ids): | |||
| data_write = [ | |||
| DXL_LOBYTE(DXL_LOWORD(action[i])), | |||
| DXL_HIBYTE(DXL_LOWORD(action[i])), | |||
| DXL_LOBYTE(DXL_HIWORD(action[i])), | |||
| DXL_HIBYTE(DXL_HIWORD(action[i])), | |||
| ] | |||
| self.pos_writer.changeParam(motor_id, data_write) | |||
| self.pos_writer.txPacket() | |||
| def set_pwm(self, action): | |||
| """ | |||
| Sets the pwm values for the servos. | |||
| :param action: list or numpy array of pwm values in range [0, 885] | |||
| """ | |||
| if not self.motor_control_state is MotorControlType.PWM: | |||
| self._set_pwm_control() | |||
| for i, motor_id in enumerate(self.servo_ids): | |||
| data_write = [ | |||
| DXL_LOBYTE(DXL_LOWORD(action[i])), | |||
| DXL_HIBYTE(DXL_LOWORD(action[i])), | |||
| ] | |||
| self.pwm_writer.changeParam(motor_id, data_write) | |||
| self.pwm_writer.txPacket() | |||
| def set_trigger_torque(self): | |||
| """ | |||
| Sets a constant torque torque for the last servo in the chain. This is useful for the trigger of the leader arm | |||
| """ | |||
| self.dynamixel._enable_torque(self.servo_ids[-1]) | |||
| self.dynamixel.set_pwm_value(self.servo_ids[-1], 200) | |||
| def limit_pwm(self, limit: Union[int, list, np.ndarray]): | |||
| """ | |||
| Limits the pwm values for the servos in for position control | |||
| @param limit: 0 ~ 885 | |||
| @return: | |||
| """ | |||
| if isinstance(limit, int): | |||
| limits = [ | |||
| limit, | |||
| ] * 5 | |||
| else: | |||
| limits = limit | |||
| self._disable_torque() | |||
| for motor_id, limit in zip(self.servo_ids, limits): | |||
| self.dynamixel.set_pwm_limit(motor_id, limit) | |||
| self._enable_torque() | |||
| def _disable_torque(self): | |||
| print(f"disabling torque for servos {self.servo_ids}") | |||
| for motor_id in self.servo_ids: | |||
| self.dynamixel._disable_torque(motor_id) | |||
| def _enable_torque(self): | |||
| print(f"enabling torque for servos {self.servo_ids}") | |||
| for motor_id in self.servo_ids: | |||
| self.dynamixel._enable_torque(motor_id) | |||
| def _set_pwm_control(self): | |||
| self._disable_torque() | |||
| for motor_id in self.servo_ids: | |||
| self.dynamixel.set_operating_mode(motor_id, OperatingMode.PWM) | |||
| self._enable_torque() | |||
| self.motor_control_state = MotorControlType.PWM | |||
| def _set_position_control(self): | |||
| self._disable_torque() | |||
| for motor_id in self.servo_ids: | |||
| self.dynamixel.set_operating_mode(motor_id, OperatingMode.POSITION) | |||
| self._enable_torque() | |||
| self.motor_control_state = MotorControlType.POSITION_CONTROL | |||
| if __name__ == "__main__": | |||
| robot = Robot(device_name="/dev/tty.usbmodem57380045631") | |||
| robot._disable_torque() | |||
| for _ in range(10000): | |||
| s = time.time() | |||
| pos = robot.read_position() | |||
| elapsed = time.time() - s | |||
| print(f"read took {elapsed} pos {pos}") | |||
+ 24
- 0
examples/aloha/benchmark/python/teleoperate_real_robot.py
View File
| @@ -0,0 +1,24 @@ | |||
| from robot import Robot | |||
| from dynamixel import Dynamixel | |||
| leader_dynamixel = Dynamixel.Config( | |||
| baudrate=1_000_000, device_name="/dev/ttyDXL_master_right" | |||
| ).instantiate() | |||
| follower_dynamixel = Dynamixel.Config( | |||
| baudrate=1_000_000, device_name="/dev/ttyDXL_puppet_right" | |||
| ).instantiate() | |||
| follower = Robot(follower_dynamixel, servo_ids=[1, 2, 3, 4, 5, 6, 7, 8]) | |||
| leader = Robot(leader_dynamixel, servo_ids=[1, 2, 3, 4, 5, 6, 7, 8]) | |||
| # leader.set_trigger_torque() | |||
| import time | |||
| times_rec = [] | |||
| times_send = [] | |||
| while True: | |||
| now = time.time() | |||
| pos = leader.read_position() | |||
| # print(f"Time to rec pos: {(time.time() - now) * 1000}") | |||
| follower.set_goal_pos(pos) | |||
| print(f"Time to send pos: {(time.time() - now) * 1000}") | |||
+ 103
- 0
examples/aloha/benchmark/ros2/README.md
View File
| @@ -0,0 +1,103 @@ | |||
| # `dora-rs` powered ALOHA | |||
| ## Getting started | |||
| ```bash | |||
| docker run --privileged --name ros2-aloha --network=host -e DISPLAY=${DISPLAY} -v /dev:/dev -v $(pwd):/dora-aloha -it osrf/ros:humble-desktop | |||
| ## In the container | |||
| ./dora-aloha/setup_ros2.sh # Run it once | |||
| ``` | |||
| ## To activate the controller, just do: | |||
| ```bash | |||
| ## In the container | |||
| ros2 launch ~/interbotix_ws/src/interbotix_ros_manipulators/interbotix_ros_xsarms/interbotix_xsarm_control/launch/xsarm_control.launch.py robot_name:=robot_model_master robot_model:=aloha_wx250s mode_configs:=/dora-aloha/benchmark/ros2/config/master_modes_right.yaml & | |||
| ros2 launch ~/interbotix_ws/src/interbotix_ros_manipulators/interbotix_ros_xsarms/interbotix_xsarm_control/launch/xsarm_control.launch.py robot_name:=robot_model_puppet robot_model:=vx300s mode_configs:=/dora-aloha/benchmark/ros2/config/puppet_modes_right.yaml & | |||
| ## In case you want to restart the controller, just do: | |||
| pkill -f robot | |||
| ``` | |||
| ## To run dora | |||
| Outside of the controller docker: | |||
| ### Setup | |||
| ```bash | |||
| ## Setup | |||
| git clone https://github.com/haixuanTao/ament_prefix_path.git $HOME/ros2-ament-prefix-path | |||
| export AMENT_PREFIX_PATH=$HOME/ros2-ament-prefix-path # <- holding ros2 message deserialization | |||
| ``` | |||
| ### Start | |||
| ```bash | |||
| ## Start | |||
| dora up | |||
| dora start dataflow.yml --attach | |||
| ``` | |||
| ## Result | |||
| I'm able to get about 100 Hz for teleoperation. | |||
| The improvement probably comes from the ros2 read/write written in C++. | |||
| ## Hardware Installation | |||
| - To check if the robot is connected, install dynamixel wizard [here](https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/) | |||
| - Dynamixel wizard is a very helpful debugging tool that connects to individual motors of the robot. It allows | |||
| things such as rebooting the motor (very useful!), torque on/off, and sending commands. | |||
| However, it has no knowledge about the kinematics of the robot, so be careful about collisions. | |||
| The robot _will_ collapse if motors are torque off i.e. there is no automatically engaged brakes in joints. | |||
| - Open Dynamixel wizard, go into `options` and select: | |||
| - Protocol 2.0 | |||
| - All ports | |||
| - 1000000 bps | |||
| - ID range from 0-10 | |||
| - Note: repeat above everytime before you scan. | |||
| - Then hit `Scan`. There should be 4 devices showing up, each with 9 motors. | |||
| - One issue that arises is the port each robot binds to can change over time, e.g. a robot that | |||
| is initially `ttyUSB0` might suddenly become `ttyUSB5`. To resolve this, we bind each robot to a fixed symlink | |||
| port with the following mapping: | |||
| - `ttyDXL_master_right`: right master robot (master: the robot that the operator would be holding) | |||
| - `ttyDXL_puppet_right`: right puppet robot (puppet: the robot that performs the task) | |||
| - `ttyDXL_master_left`: left master robot | |||
| - `ttyDXL_puppet_left`: left puppet robot | |||
| - Take `ttyDXL_master_right`: right master robot as an example: | |||
| 1. Find the port that the right master robot is currently binding to, e.g. `ttyUSB0` | |||
| 2. run `udevadm info --name=/dev/ttyUSB0 --attribute-walk | grep serial` to obtain the serial number. Use the first one that shows up, the format should look similar to `FT6S4DSP`. | |||
| 3. `sudo vim /etc/udev/rules.d/99-fixed-interbotix-udev.rules` and add the following line: | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="<serial number here>", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_master_right" | |||
| 4. This will make sure the right master robot is _always_ binding to `ttyDXL_master_right` | |||
| 5. Repeat with the rest of 3 arms. | |||
| - To apply the changes, run `sudo udevadm control --reload && sudo udevadm trigger` | |||
| - If successful, you should be able to find `ttyDXL*` in your `/dev` | |||
| ## Hardware troubleshoot | |||
| - In case you're having `xsarm_control.launch.py` that is not launching for the reason: ` Can't find Dynamixel ID 'X'`, one of the issue I faced in my demo was Overload Error(OL). The fix was to go on Dynamixel Wizard, click on the motor ID `X` and clicking the reboot button the right side of the window. This error happens when the torque is too high. I had the issue when I try to set a closing position for the gripper that did not take into account the fingers. | |||
| ## Support Matrix | |||
| | | dora-aloha | | |||
| | ----------------------------- | --------------------- | | |||
| | **Supported Platforms (x86)** | Windows, macOS, Linux | | |||
| | **Supported Platforms (ARM)** | Linux(RPI4) | | |||
| ## Documentation | |||
| https://github.com/Interbotix/interbotix_ros_toolboxes/blob/humble/interbotix_xs_toolbox/interbotix_xs_modules/interbotix_xs_modules/xs_robot/core.py | |||
| https://github.com/Interbotix/interbotix_ros_toolboxes/blob/c187bcea89b60391244bb19943ebd78f770aa975/interbotix_xs_toolbox/interbotix_xs_modules/interbotix_xs_modules/xs_robot/core.py#L380-L398 | |||
| ## Acknowledgement | |||
| This work is heavily inspired from [tonyzhaozh/aloha](https://github.com/tonyzhaozh/aloha) and we're trying to bring perfornance improvement. | |||
+ 9
- 0
examples/aloha/benchmark/ros2/config/master_modes_left.yaml
View File
| @@ -0,0 +1,9 @@ | |||
| port: /dev/ttyDXL_master_left | |||
| groups: | |||
| arm: | |||
| torque_enable: false | |||
| singles: | |||
| gripper: | |||
| torque_enable: false | |||
+ 9
- 0
examples/aloha/benchmark/ros2/config/master_modes_right.yaml
View File
| @@ -0,0 +1,9 @@ | |||
| port: /dev/ttyDXL_master_right | |||
| groups: | |||
| arm: | |||
| torque_enable: false | |||
| singles: | |||
| gripper: | |||
| torque_enable: false | |||
+ 17
- 0
examples/aloha/benchmark/ros2/config/puppet_modes_left.yaml
View File
| @@ -0,0 +1,17 @@ | |||
| port: /dev/ttyDXL_puppet_left | |||
| groups: | |||
| arm: | |||
| operating_mode: position | |||
| profile_type: velocity | |||
| profile_velocity: 0 | |||
| profile_acceleration: 0 | |||
| torque_enable: true | |||
| singles: | |||
| gripper: | |||
| operating_mode: linear_position | |||
| profile_type: velocity | |||
| profile_velocity: 0 | |||
| profile_acceleration: 0 | |||
| torque_enable: true | |||
+ 17
- 0
examples/aloha/benchmark/ros2/config/puppet_modes_right.yaml
View File
| @@ -0,0 +1,17 @@ | |||
| port: /dev/ttyDXL_puppet_right | |||
| groups: | |||
| arm: | |||
| operating_mode: position | |||
| profile_type: velocity | |||
| profile_velocity: 0 | |||
| profile_acceleration: 0 | |||
| torque_enable: true | |||
| singles: | |||
| gripper: | |||
| operating_mode: linear_position | |||
| profile_type: velocity | |||
| profile_velocity: 0 | |||
| profile_acceleration: 0 | |||
| torque_enable: true | |||
+ 4
- 0
examples/aloha/benchmark/ros2/dataflow.yml
View File
| @@ -0,0 +1,4 @@ | |||
| nodes: | |||
| - id: control | |||
| custom: | |||
| source: teleop.py | |||
+ 22
- 0
examples/aloha/benchmark/ros2/setup_ros2.sh
View File
| @@ -0,0 +1,22 @@ | |||
| # setup ros2 | |||
| ## Source: https://docs.trossenrobotics.com/interbotix_xsarms_docs/ros_interface/ros2/software_setup.html | |||
| sudo apt update | |||
| sudo apt install curl vim git -y | |||
| curl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/humble/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.sh | |||
| source /opt/ros/$ROS_DISTRO/setup.bash | |||
| chmod +x xsarm_amd64_install.sh | |||
| ./xsarm_amd64_install.sh -d humble -n | |||
| source /opt/ros/$ROS_DISTRO/setup.bash | |||
| source ~/interbotix_ws/install/setup.bash | |||
| ros2 pkg list | grep interbotix | |||
+ 90
- 0
examples/aloha/benchmark/ros2/teleop.py
View File
| @@ -0,0 +1,90 @@ | |||
| import dora | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| import numpy as np | |||
| ros2_context = dora.experimental.ros2_bridge.Ros2Context() | |||
| ros2_node = ros2_context.new_node( | |||
| "robot_model_master", | |||
| "/dora", | |||
| dora.experimental.ros2_bridge.Ros2NodeOptions(rosout=True), | |||
| ) | |||
| # Define a ROS2 QOS | |||
| topic_qos = dora.experimental.ros2_bridge.Ros2QosPolicies( | |||
| reliable=True, max_blocking_time=0.1 | |||
| ) | |||
| # Create a publisher to cmd_vel topic | |||
| puppet_arm_command = ros2_node.create_publisher( | |||
| ros2_node.create_topic( | |||
| "/robot_model_puppet/commands/joint_group", | |||
| "interbotix_xs_msgs/JointGroupCommand", | |||
| topic_qos, | |||
| ) | |||
| ) | |||
| gripper_command = ros2_node.create_publisher( | |||
| ros2_node.create_topic( | |||
| "/robot_model_puppet/commands/joint_single", | |||
| "interbotix_xs_msgs/JointSingleCommand", | |||
| topic_qos, | |||
| ) | |||
| ) | |||
| # Create a listener to pose topic | |||
| master_state = ros2_node.create_subscription( | |||
| ros2_node.create_topic( | |||
| "/robot_model_master/joint_states", "sensor_msgs/JointState", topic_qos | |||
| ) | |||
| ) | |||
| # Create a dora node | |||
| dora_node = Node() | |||
| # Listen for both stream on the same loop as Python does not handle well multiprocessing | |||
| dora_node.merge_external_events(master_state) | |||
| PUPPET_GRIPPER_MAX = 0.115 | |||
| PUPPET_GRIPPER_MIN = 0.0965 | |||
| MASTER_GRIPPER_MAX = 0.8 | |||
| MASTER_GRIPPER_MIN = -0.1 | |||
| RATIO = (PUPPET_GRIPPER_MAX - PUPPET_GRIPPER_MIN) / ( | |||
| MASTER_GRIPPER_MAX - MASTER_GRIPPER_MIN | |||
| ) | |||
| for event in dora_node: | |||
| event_kind = event["kind"] | |||
| # ROS2 Event | |||
| if event_kind == "external": | |||
| pose = event.inner()[0] | |||
| values = np.array(pose["position"].values, dtype=np.float32) | |||
| values[6] = np.clip( | |||
| (values[6] - MASTER_GRIPPER_MIN) * RATIO + PUPPET_GRIPPER_MIN, | |||
| PUPPET_GRIPPER_MIN, | |||
| PUPPET_GRIPPER_MAX, | |||
| ) | |||
| gripper_command.publish( | |||
| pa.array( | |||
| [ | |||
| { | |||
| "name": "gripper", | |||
| "cmd": np.float32(values[6]), | |||
| } | |||
| ] | |||
| ), | |||
| ) | |||
| puppet_arm_command.publish( | |||
| pa.array( | |||
| [ | |||
| { | |||
| "name": "arm", | |||
| "cmd": values[:6], | |||
| } | |||
| ] | |||
| ), | |||
| ) | |||
+ 9
- 0
examples/aloha/benchmark/rust/README.md
View File
| @@ -0,0 +1,9 @@ | |||
| # Rust powered ALOHA | |||
| ## Getting started | |||
| Modify port and servo motor configuration for your device within `aloha-teleop` | |||
| ```bash | |||
| cargo run -p aloha-teleop --release | |||
| ``` | |||
+ 141
- 0
examples/aloha/graphs/eval.yml
View File
| @@ -0,0 +1,141 @@ | |||
| nodes: | |||
| - id: aloha-client | |||
| custom: | |||
| source: cargo | |||
| args: run --release -p aloha-client | |||
| inputs: | |||
| puppet_goal_position: eval/action | |||
| tick: dora/timer/millis/5 | |||
| outputs: | |||
| - puppet_position | |||
| - id: plot | |||
| custom: | |||
| source: ../nodes/plot_node.py | |||
| inputs: | |||
| image: cam_right_wrist/image | |||
| action: eval/action | |||
| puppet_position: aloha-client/puppet_position | |||
| envs: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: cam_left_wrist | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 2 | |||
| - id: cam_right_wrist | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 22 | |||
| - id: cam_low | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 14 | |||
| - id: cam_high | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 8 | |||
| - id: eval | |||
| custom: | |||
| source: python | |||
| args: /home/rcadene/dora_lerobot/dora_lerobot/scripts/eval.py -p cadene/aloha_act_no_state_aloha_v2_static_dora_test_wrist_gripper eval.n_episodes=1 eval.batch_size=1 env.episode_length=20000 | |||
| inputs: | |||
| agent_pos: aloha-client/puppet_position | |||
| cam_left_wrist: cam_left_wrist/image | |||
| cam_right_wrist: cam_right_wrist/image | |||
| cam_low: cam_low/image | |||
| cam_high: cam_high/image | |||
| outputs: | |||
| - action | |||
| - id: keyboard | |||
| custom: | |||
| source: ../nodes/keyboard_node.py | |||
| inputs: | |||
| heartbeat: dora/timer/millis/20 | |||
| outputs: | |||
| - space | |||
| - failed | |||
| - id: cam_saver_left_wrist | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_left_wrist/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_left_wrist | |||
| - id: cam_saver_right_wrist | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_right_wrist/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_right_wrist | |||
| - id: cam_saver_low | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_low/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_low | |||
| - id: cam_saver_high | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_high/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_high | |||
| - id: dora-record | |||
| custom: | |||
| build: cargo install --git https://github.com/dora-rs/dora dora-record | |||
| source: dora-record | |||
| inputs: | |||
| action: eval/action | |||
| observation.state: aloha-client/puppet_position | |||
| episode_index: keyboard/space | |||
| failed_episode_index: keyboard/failed | |||
| observation.images.cam_left_wrist: cam_saver_left_wrist/saved_image | |||
| observation.images.cam_right_wrist: cam_saver_right_wrist/saved_image | |||
| observation.images.cam_low: cam_saver_low/saved_image | |||
| observation.images.cam_high: cam_saver_high/saved_image | |||
+ 38
- 0
examples/aloha/graphs/gym.yml
View File
| @@ -0,0 +1,38 @@ | |||
| nodes: | |||
| - id: aloha-client | |||
| custom: | |||
| source: cargo | |||
| args: run -p aloha-client --release | |||
| inputs: | |||
| puppet_goal_position: dora-gym/action | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - puppet_position | |||
| - id: plot | |||
| custom: | |||
| source: ../nodes/plot_node.py | |||
| inputs: | |||
| image: cam_left_wrist/image | |||
| envs: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: cam_left_wrist | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 2 | |||
| - id: dora-gym | |||
| custom: | |||
| source: ../nodes/gym_dora_node.py | |||
| inputs: | |||
| agent_pos: aloha-client/puppet_position | |||
| cam_left_wrist: cam_left_wrist/image | |||
| outputs: | |||
| - action | |||
+ 162
- 0
examples/aloha/graphs/record_2arms_teleop.yml
View File
| @@ -0,0 +1,162 @@ | |||
| nodes: | |||
| - id: teleop_right | |||
| custom: | |||
| source: cargo | |||
| args: run --release -p aloha-teleop | |||
| inputs: | |||
| heartbeat: dora/timer/millis/20 | |||
| outputs: | |||
| - puppet_goal_position | |||
| - puppet_position | |||
| - puppet_velocity | |||
| - puppet_current | |||
| - id: dora-record | |||
| custom: | |||
| build: cargo install --git https://github.com/dora-rs/dora dora-record | |||
| source: dora-record | |||
| inputs: | |||
| action: teleop_right/puppet_goal_position | |||
| observation.state: teleop_right/puppet_position | |||
| observation.velocity: teleop_right/puppet_velocity | |||
| observation.effort: teleop_right/puppet_current | |||
| episode_index: keyboard/space | |||
| failed_episode_index: keyboard/failed | |||
| observation.images.cam_left_wrist: cam_saver_left_wrist/saved_image | |||
| observation.images.cam_right_wrist: cam_saver_right_wrist/saved_image | |||
| observation.images.cam_low: cam_saver_low/saved_image | |||
| observation.images.cam_high: cam_saver_high/saved_image | |||
| - id: cam_left_wrist | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 2 | |||
| - id: cam_right_wrist | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 22 | |||
| - id: cam_low | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 14 | |||
| - id: cam_high | |||
| custom: | |||
| source: ../nodes/webcam.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - image | |||
| envs: | |||
| CAMERA_ID: 8 | |||
| - id: keyboard | |||
| custom: | |||
| source: ../nodes/keyboard_node.py | |||
| inputs: | |||
| heartbeat: dora/timer/millis/20 | |||
| outputs: | |||
| - space | |||
| - failed | |||
| - id: cam_saver_left_wrist | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_left_wrist/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_left_wrist | |||
| - id: cam_saver_right_wrist | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_right_wrist/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_right_wrist | |||
| - id: cam_saver_low | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_low/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_low | |||
| - id: cam_saver_high | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: cam_high/image | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_high | |||
| # Realsense seems to require specific power that makes it unreliable in our current setup | |||
| # - id: cam_left_wrist | |||
| # custom: | |||
| # source: ../nodes/realsense_node.py | |||
| # inputs: | |||
| # tick: dora/timer/millis/2 | |||
| # outputs: | |||
| # - image | |||
| # envs: | |||
| # CAMERA_ID: 128422271614 | |||
| # - id: cam_right_wrist | |||
| # custom: | |||
| # source: ../nodes/realsense_node.py | |||
| # inputs: | |||
| # tick: dora/timer/millis/2 | |||
| # outputs: | |||
| # - image | |||
| # envs: | |||
| # CAMERA_ID: 128422270109 | |||
| # - id: cam_low | |||
| # custom: | |||
| # source: ../nodes/realsense_node.py | |||
| # inputs: | |||
| # tick: dora/timer/millis/2 | |||
| # outputs: | |||
| # - image | |||
| # envs: | |||
| # CAMERA_ID: 128422271393 | |||
| # - id: cam_high | |||
| # custom: | |||
| # source: ../nodes/realsense_node.py | |||
| # inputs: | |||
| # tick: dora/timer/millis/2 | |||
| # outputs: | |||
| # - image | |||
| # envs: | |||
| # CAMERA_ID: 128422271609 | |||
+ 32
- 0
examples/aloha/graphs/record_teleop.yml
View File
| @@ -0,0 +1,32 @@ | |||
| nodes: | |||
| - id: teleop | |||
| custom: | |||
| source: cargo | |||
| args: run -p aloha-teleop --release | |||
| outputs: | |||
| - puppet_goal_position | |||
| - id: dora-record | |||
| custom: | |||
| build: cargo install --git https://github.com/dora-rs/dora dora-record | |||
| source: dora-record | |||
| inputs: | |||
| puppet_goal_position: teleop/puppet_goal_position | |||
| - id: plot | |||
| custom: | |||
| source: ../nodes/plot_node.py | |||
| inputs: | |||
| image: webcam/image | |||
| position: teleop/puppet_goal_position | |||
| envs: | |||
| IMAGE_WIDTH: 1280 | |||
| IMAGE_HEIGHT: 720 | |||
| - id: webcam | |||
| custom: | |||
| source: ../nodes/realsense_node.py | |||
| inputs: | |||
| tick: dora/timer/millis/20 | |||
| outputs: | |||
| - image | |||
+ 61
- 0
examples/aloha/graphs/replay.yml
View File
| @@ -0,0 +1,61 @@ | |||
| nodes: | |||
| - id: aloha-client | |||
| custom: | |||
| source: cargo | |||
| args: run -p aloha-client --release | |||
| inputs: | |||
| puppet_goal_position: replay/puppet_goal_position | |||
| tick: dora/timer/millis/20 | |||
| outputs: | |||
| - puppet_position | |||
| - id: replay | |||
| custom: | |||
| source: ../nodes/replay.py | |||
| inputs: | |||
| action: policy/action | |||
| outputs: | |||
| - puppet_goal_position | |||
| - id: whisper | |||
| custom: | |||
| source: ../nodes/whisper_node.py | |||
| inputs: | |||
| tick: dora/timer/millis/20 | |||
| outputs: | |||
| - text_llm | |||
| - text_policy | |||
| - id: llm | |||
| operator: | |||
| python: ../nodes/llm_op.py | |||
| inputs: | |||
| text: whisper/text_llm | |||
| - id: policy | |||
| operator: | |||
| python: ../nodes/policy.py | |||
| inputs: | |||
| speech: whisper/text_policy | |||
| outputs: | |||
| - action | |||
| - id: plot | |||
| custom: | |||
| source: ../nodes/plot_node.py | |||
| inputs: | |||
| image: webcam/image | |||
| position: aloha-client/puppet_position | |||
| text_policy: whisper/text_policy | |||
| text_llm: whisper/text_llm | |||
| envs: | |||
| IMAGE_WIDTH: 1280 | |||
| IMAGE_HEIGHT: 720 | |||
| - id: webcam | |||
| custom: | |||
| source: ../nodes/realsense_node.py | |||
| inputs: | |||
| tick: dora/timer/millis/20 | |||
| outputs: | |||
| - image | |||
+ 4
- 0
examples/aloha/hardware_config/99-fixed-interbotix-udev.rules
View File
| @@ -0,0 +1,4 @@ | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="FT891KPN", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_master_left" | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="FT89FM77", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_master_right" | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="FT89FM09", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_puppet_left" | |||
| SUBSYSTEM=="tty", ATTRS{serial}=="FT891KBG", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL_puppet_right" | |||
+ 24
- 0
examples/aloha/hardware_config/99-interbotix-udev.rules
View File
| @@ -0,0 +1,24 @@ | |||
| # Place this file in /etc/udev/rules.d/ | |||
| # Then reload udev by typing 'udevadm control --reload-rules && udevadm trigger' | |||
| # Sets up rules to give permanent names to devices | |||
| # Allow serial devices to be read by anyone | |||
| KERNEL=="ttyUSB*", MODE:="0666" | |||
| KERNEL=="ttyACM*", MODE:="0666" | |||
| KERNEL=="js*", MODE:="0666" | |||
| KERNEL=="video*", MODE:="0666" | |||
| # OpenCM9.04C board | |||
| SUBSYSTEM=="tty", ATTRS{idVendor}=="fff1", ATTRS{idProduct}=="ff48", ENV{ID_MM_DEVICE_IGNORE}="1", SYMLINK+="ttyDXL" | |||
| # U2D2 board (also sets latency timer to 1ms for faster communication) | |||
| SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6014", ENV{ID_MM_DEVICE_IGNORE}="1", ATTR{device/latency_timer}="1", SYMLINK+="ttyDXL" | |||
| # RPLidar | |||
| SUBSYSTEM=="tty", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", SYMLINK+="rplidar" | |||
| # Kobuki base | |||
| SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", ATTRS{serial}=="kobuki*", ATTR{device/latency_timer}="1", MODE:="0666", GROUP:="dialout", SYMLINK+="kobuki" | |||
| # LifeCam Cinema | |||
| SUBSYSTEM=="video4linux", ATTRS{idVendor}=="045e", ATTRS{idProduct}=="0812", ATTR{index}=="0", SYMLINK+="lifecam" | |||
+ 13
- 0
examples/aloha/nodes/aloha-client/Cargo.toml
View File
| @@ -0,0 +1,13 @@ | |||
| [package] | |||
| name = "aloha-client" | |||
| version = "0.1.0" | |||
| edition = "2021" | |||
| # See more keys and their definitions at https://doc.rust-lang.org/cargo/reference/manifest.html | |||
| [dependencies] | |||
| serialport = "4.2.0" | |||
| rustypot = { git = "https://github.com/haixuanTao/rustypot", branch = "angular-conversion" } | |||
| eyre = "0.6.12" | |||
| dora-node-api = "0.3.4" | |||
+ 104
- 0
examples/aloha/nodes/aloha-client/src/main.rs
View File
| @@ -0,0 +1,104 @@ | |||
| use dora_node_api::{ | |||
| arrow::array::Float64Array, dora_core::config::DataId, DoraNode, Event, IntoArrow, | |||
| }; | |||
| use eyre::{Context, Result}; | |||
| use rustypot::{device::xm, DynamixelSerialIO}; | |||
| use std::time::Duration; | |||
| fn main() -> Result<()> { | |||
| let (mut node, mut events) = DoraNode::init_from_env()?; | |||
| let mut puppet_left_serial_port = serialport::new("/dev/ttyDXL_puppet_left", 1_000_000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .expect("Failed to open port"); | |||
| let mut puppet_right_serial_port = serialport::new("/dev/ttyDXL_puppet_right", 1_000_000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .expect("Failed to open port"); | |||
| let io = DynamixelSerialIO::v2(); | |||
| xm::sync_write_torque_enable( | |||
| &io, | |||
| puppet_left_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &[1; 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| xm::sync_write_torque_enable( | |||
| &io, | |||
| puppet_right_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &[1; 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| xm::sync_write_operating_mode(&io, puppet_left_serial_port.as_mut(), &[9], &[5]) | |||
| .expect("Communication error"); | |||
| xm::sync_write_operating_mode(&io, puppet_right_serial_port.as_mut(), &[9], &[5]) | |||
| .expect("Communication error"); | |||
| while let Some(Event::Input { | |||
| id, | |||
| metadata: _, | |||
| data, | |||
| }) = events.recv() | |||
| { | |||
| match id.as_str() { | |||
| "puppet_goal_position" => { | |||
| let buffer: Float64Array = data | |||
| .to_data() | |||
| .try_into() | |||
| .context("Could not parse `puppet_goal_position` as float64")?; | |||
| let target: &[f64] = buffer.values(); | |||
| let mut angular = target | |||
| .iter() | |||
| .map(|&x| xm::conv::radians_to_pos(x)) | |||
| .collect::<Vec<_>>(); | |||
| angular.insert(2, angular[1]); | |||
| angular.insert(4, angular[3]); | |||
| angular.insert(11, angular[10]); | |||
| angular.insert(13, angular[12]); | |||
| xm::sync_write_goal_position( | |||
| &io, | |||
| puppet_left_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &angular[..9], | |||
| ) | |||
| .expect("Communication error"); | |||
| xm::sync_write_goal_position( | |||
| &io, | |||
| puppet_right_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &angular[9..18], | |||
| ) | |||
| .expect("Communication error"); | |||
| } | |||
| "tick" => { | |||
| let mut pos_left = xm::sync_read_present_position( | |||
| &io, | |||
| puppet_left_serial_port.as_mut(), | |||
| &[1, 2, 4, 6, 7, 8, 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| let pos_right = xm::sync_read_present_position( | |||
| &io, | |||
| puppet_right_serial_port.as_mut(), | |||
| &[1, 2, 4, 6, 7, 8, 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| pos_left.extend_from_slice(&pos_right); | |||
| let pos: Vec<f64> = pos_left | |||
| .iter() | |||
| .map(|&x| xm::conv::pos_to_radians(x)) | |||
| .collect(); | |||
| node.send_output( | |||
| DataId::from("puppet_position".to_owned()), | |||
| Default::default(), | |||
| pos.into_arrow(), | |||
| )?; | |||
| } | |||
| _ => todo!(), | |||
| }; | |||
| } | |||
| Ok(()) | |||
| } | |||
+ 15
- 0
examples/aloha/nodes/aloha-teleop/Cargo.toml
View File
| @@ -0,0 +1,15 @@ | |||
| [package] | |||
| name = "aloha-teleop" | |||
| version = "0.1.0" | |||
| edition = "2021" | |||
| # See more keys and their definitions at https://doc.rust-lang.org/cargo/reference/manifest.html | |||
| [dependencies] | |||
| serialport = "4.2.0" | |||
| rustypot = { git = "https://github.com/haixuanTao/rustypot", branch = "angular-conversion" } | |||
| eyre = "0.6.12" | |||
| clap = { version = "4.5.4", features = ["derive"] } | |||
| dora-node-api = "0.3.4" | |||
| lazy_static = "1.4.0" | |||
+ 38
- 0
examples/aloha/nodes/aloha-teleop/src/_main.rs
View File
| @@ -0,0 +1,38 @@ | |||
| use rustypot::{device::xm, DynamixelSerialIO}; | |||
| use std::time::{Duration, Instant}; | |||
| fn main() { | |||
| let mut master_serial_port = serialport::new("/dev/ttyDXL_master_right", 1_000_000) | |||
| .timeout(Duration::from_millis(200)) | |||
| .open() | |||
| .expect("Failed to open port"); | |||
| let mut puppet_serial_port = serialport::new("/dev/ttyDXL_puppet_right", 1_000_000) | |||
| .timeout(Duration::from_millis(200)) | |||
| .open() | |||
| .expect("Failed to open port"); | |||
| let io = DynamixelSerialIO::v2(); | |||
| xm::sync_write_torque_enable( | |||
| &io, | |||
| puppet_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8], | |||
| &[1; 8], | |||
| ) | |||
| .expect("Communication error"); | |||
| loop { | |||
| let pos = xm::sync_read_present_position( | |||
| &io, | |||
| master_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8], | |||
| ) | |||
| .expect("Communication error"); | |||
| xm::sync_write_goal_position( | |||
| &io, | |||
| puppet_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8], | |||
| &pos, | |||
| ) | |||
| .expect("Communication error"); | |||
| } | |||
| } | |||
+ 242
- 0
examples/aloha/nodes/aloha-teleop/src/main.rs
View File
| @@ -0,0 +1,242 @@ | |||
| use dora_node_api::{dora_core::config::DataId, DoraNode, IntoArrow, MetadataParameters}; | |||
| use eyre::{Context, Result}; | |||
| use rustypot::{device::xm, DynamixelSerialIO}; | |||
| use serialport::SerialPort; | |||
| use std::{ | |||
| sync::mpsc, | |||
| thread::JoinHandle, | |||
| time::{Duration, Instant}, | |||
| }; | |||
| const MAX_MASTER_GRIPER: f64 = 0.7761942786701344; | |||
| const MAX_PUPPET_GRIPER: f64 = 1.6827769243105486; | |||
| const MIN_MASTER_GRIPER: f64 = -0.12732040539450828; | |||
| const MIN_PUPPET_GRIPER: f64 = 0.6933593161243099; | |||
| use clap::Parser; | |||
| /// Simple aloha teleop program for recording data | |||
| #[derive(Parser, Debug)] | |||
| #[command(version, about, long_about = None)] | |||
| struct Args { | |||
| #[arg(short, long, default_value = "/dev/ttyDXL_master_left")] | |||
| master_left_path: String, | |||
| #[arg(short, long, default_value = "/dev/ttyDXL_puppet_left")] | |||
| puppet_left_path: String, | |||
| #[arg(short, long, default_value = "/dev/ttyDXL_master_right")] | |||
| master_right_path: Option<String>, | |||
| #[arg(short, long, default_value = "/dev/ttyDXL_puppet_right")] | |||
| puppet_right_path: Option<String>, | |||
| } | |||
| enum State { | |||
| Position(Vec<f64>), | |||
| Velocity(Vec<f64>), | |||
| Current(Vec<u16>), | |||
| GoalPosition(Vec<f64>), | |||
| } | |||
| #[derive(Clone, Copy)] | |||
| enum Side { | |||
| Left, | |||
| Right, | |||
| } | |||
| fn main_multithreaded( | |||
| io: DynamixelSerialIO, | |||
| mut master_serial_port: Box<dyn SerialPort>, | |||
| mut puppet_serial_port: Box<dyn SerialPort>, | |||
| side: Side, | |||
| tx_dora: mpsc::Sender<(Side, State)>, | |||
| ) -> Result<JoinHandle<()>> { | |||
| let (tx, rx) = mpsc::channel(); | |||
| let tx_dora_read = tx_dora.clone(); | |||
| std::thread::spawn(move || loop { | |||
| let now = Instant::now(); | |||
| let pos = xm::sync_read_present_position( | |||
| &io, | |||
| master_serial_port.as_mut(), | |||
| &[1, 2, 4, 6, 7, 8, 9], // 3 and 5 are skipped as thery share the same position as 2 and 4 | |||
| ) | |||
| .expect("Read Communication error"); | |||
| let radians: Vec<f64> = pos.iter().map(|&x| xm::conv::pos_to_radians(x)).collect(); | |||
| tx.send((now, radians.clone())).unwrap(); | |||
| tx_dora.send((side, State::Position(radians))).unwrap(); | |||
| let vel = xm::sync_read_present_velocity( | |||
| &io, | |||
| master_serial_port.as_mut(), | |||
| &[1, 2, 4, 6, 7, 8, 9], // 3 and 5 are skipped as thery share the same position as 2 and 4 | |||
| ) | |||
| .expect("Read Communication error"); | |||
| let rad_per_sec: Vec<f64> = vel | |||
| .iter() | |||
| .map(|&x| xm::conv::abs_speed_to_rad_per_sec(x)) | |||
| .collect(); | |||
| tx_dora.send((side, State::Velocity(rad_per_sec))).unwrap(); | |||
| let load = | |||
| xm::sync_read_present_current(&io, master_serial_port.as_mut(), &[1, 2, 4, 6, 7, 8, 9]) // 3 and 5 are skipped as thery share the same position as 2 and 4 | |||
| .expect("Read Communication error"); | |||
| tx_dora.send((side, State::Current(load))).unwrap(); | |||
| }); | |||
| let io = DynamixelSerialIO::v2(); | |||
| let join = std::thread::spawn(move || { | |||
| while let Ok((_now, mut pos)) = rx.recv() { | |||
| pos[6] = (pos[6] - MIN_MASTER_GRIPER) * (MAX_PUPPET_GRIPER - MIN_PUPPET_GRIPER) | |||
| / (MAX_MASTER_GRIPER - MIN_MASTER_GRIPER) | |||
| + MIN_PUPPET_GRIPER; | |||
| tx_dora_read | |||
| .send((side, State::GoalPosition(pos.clone()))) | |||
| .unwrap(); | |||
| pos.insert(2, pos[1]); | |||
| pos.insert(4, pos[3]); | |||
| let pos: Vec<u32> = pos.iter().map(|&x| xm::conv::radians_to_pos(x)).collect(); | |||
| // Compute linear interpolation for gripper as input and output range mismatch | |||
| xm::sync_write_goal_position( | |||
| &io, | |||
| puppet_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &pos, | |||
| ) | |||
| .expect("Write Communication error"); | |||
| // println!("elapsed time: {:?}", now.elapsed()); | |||
| } | |||
| }); | |||
| Ok(join) | |||
| } | |||
| fn main() -> Result<()> { | |||
| let args = Args::parse(); | |||
| let (tx_dora, rx_dora) = mpsc::channel(); | |||
| // right arm | |||
| let join_right = if let (Some(master_right_path), Some(puppet_right_path)) = | |||
| (args.master_right_path.clone(), args.puppet_right_path) | |||
| { | |||
| let master_right_serial_port = serialport::new(master_right_path, 1000000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .context("Failed to open port")?; | |||
| let mut puppet_right_serial_port = serialport::new(puppet_right_path, 1000000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .context("Failed to open port")?; | |||
| let io = DynamixelSerialIO::v2(); | |||
| xm::sync_write_torque_enable( | |||
| &io, | |||
| puppet_right_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &[1; 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| // Set operating mode to current based position control to not overload the gripper | |||
| xm::sync_write_operating_mode(&io, puppet_right_serial_port.as_mut(), &[9], &[5]) | |||
| .expect("Communication error"); | |||
| Some(main_multithreaded( | |||
| io, | |||
| master_right_serial_port, | |||
| puppet_right_serial_port, | |||
| Side::Right, | |||
| tx_dora.clone(), | |||
| )?) | |||
| } else { | |||
| None | |||
| }; | |||
| // Left arm | |||
| let master_left_serial_port = serialport::new(args.master_left_path, 1000000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .context("Failed to open port")?; | |||
| let mut puppet_left_serial_port = serialport::new(args.puppet_left_path, 1000000) | |||
| .timeout(Duration::from_millis(2)) | |||
| .open() | |||
| .context("Failed to open port")?; | |||
| let io = DynamixelSerialIO::v2(); | |||
| xm::sync_write_torque_enable( | |||
| &io, | |||
| puppet_left_serial_port.as_mut(), | |||
| &[1, 2, 3, 4, 5, 6, 7, 8, 9], | |||
| &[1; 9], | |||
| ) | |||
| .expect("Communication error"); | |||
| // Set operating mode to current based position control to not overload the gripper | |||
| xm::sync_write_operating_mode(&io, puppet_left_serial_port.as_mut(), &[9], &[5]) | |||
| .expect("Communication error"); | |||
| let join_left = main_multithreaded( | |||
| io, | |||
| master_left_serial_port, | |||
| puppet_left_serial_port, | |||
| Side::Left, | |||
| tx_dora, | |||
| )?; | |||
| if std::env::var("DORA_NODE_CONFIG").is_ok() { | |||
| let (mut node, mut events) = DoraNode::init_from_env()?; | |||
| let mut pos_right = Vec::new(); | |||
| let mut vel_right = Vec::new(); | |||
| let mut current_right = Vec::new(); | |||
| let mut goal_right = Vec::new(); | |||
| while let Ok((side, target)) = rx_dora.recv() { | |||
| match side { | |||
| Side::Left => { | |||
| let parameters = MetadataParameters::default(); | |||
| // Skip if we don't have any data from the right arm | |||
| if args.master_right_path.is_some() && pos_right.is_empty() { | |||
| continue; | |||
| } | |||
| match target { | |||
| State::Position(mut pos) => { | |||
| pos.extend_from_slice(&pos_right); | |||
| let output = DataId::from("puppet_position".to_owned()); | |||
| node.send_output(output.clone(), parameters, pos.into_arrow())?; | |||
| } | |||
| State::Velocity(mut vel) => { | |||
| vel.extend_from_slice(&vel_right); | |||
| let output = DataId::from("puppet_velocity".to_owned()); | |||
| node.send_output(output.clone(), parameters, vel.into_arrow())?; | |||
| } | |||
| State::Current(mut load) => { | |||
| load.extend_from_slice(¤t_right); | |||
| let output = DataId::from("puppet_current".to_owned()); | |||
| node.send_output(output.clone(), parameters, load.into_arrow())?; | |||
| } | |||
| State::GoalPosition(mut pos) => { | |||
| pos.extend_from_slice(&goal_right); | |||
| let output = DataId::from("puppet_goal_position".to_owned()); | |||
| node.send_output(output.clone(), parameters, pos.into_arrow())?; | |||
| } | |||
| } | |||
| if events.recv_timeout(Duration::from_nanos(100)).is_none() { | |||
| println!("Events channel finished"); | |||
| break; | |||
| } | |||
| } | |||
| Side::Right => match target { | |||
| State::Position(pos) => { | |||
| pos_right = pos; | |||
| } | |||
| State::Velocity(vel) => { | |||
| vel_right = vel; | |||
| } | |||
| State::Current(load) => { | |||
| current_right = load; | |||
| } | |||
| State::GoalPosition(pos) => { | |||
| goal_right = pos; | |||
| } | |||
| }, | |||
| } | |||
| } | |||
| } else { | |||
| join_left.join().unwrap(); | |||
| join_right.map(|join| join.join().unwrap()); | |||
| }; | |||
| Ok(()) | |||
| } | |||
+ 66
- 0
examples/aloha/nodes/gym_dora_node.py
View File
| @@ -0,0 +1,66 @@ | |||
| import gymnasium as gym | |||
| import gym_dora # noqa: F401 | |||
| import pandas as pd | |||
| import time | |||
| from pathlib import Path | |||
| env = gym.make( | |||
| "gym_dora/DoraAloha-v0", disable_env_checker=True, max_episode_steps=10000 | |||
| ) | |||
| observation = env.reset() | |||
| class ReplayPolicy: | |||
| def __init__(self, example_path, epidode=0): | |||
| df_action = pd.read_parquet(example_path / "action.parquet") | |||
| df_episode_index = pd.read_parquet(example_path / "episode_index.parquet") | |||
| self.df = pd.merge_asof( | |||
| df_action[["timestamp_utc", "action"]], | |||
| df_episode_index[["timestamp_utc", "episode_index"]], | |||
| on="timestamp_utc", | |||
| direction="backward", | |||
| ) | |||
| # self.df["episode_index"] = self.df["episode_index"].map(lambda x: x[0]) | |||
| self.df = self.df[self.df["episode_index"] == epidode] | |||
| self.current_time = self.df["timestamp_utc"].iloc[0] | |||
| self.topic = "action" | |||
| self.index = 0 | |||
| self.finished = False | |||
| def select_action(self, obs): | |||
| if self.index < len(self.df): | |||
| self.index += 1 | |||
| else: | |||
| self.finished = True | |||
| row = self.df.iloc[self.index] | |||
| delta_time = (row["timestamp_utc"] - self.current_time).microseconds | |||
| self.current_time = row["timestamp_utc"] | |||
| if delta_time > 0: | |||
| time.sleep(delta_time / 1_000_000) | |||
| return row[self.topic], self.finished | |||
| # policy = ReplayPolicy( | |||
| # Path( | |||
| # "/home/rcadene/dora-aloha/aloha/graphs/out/018fa076-ad19-7c77-afa4-49f7f072e86f" | |||
| # ) | |||
| # ) | |||
| policy = ReplayPolicy( | |||
| Path( | |||
| "/home/rcadene/dora-aloha/aloha/graphs/out/018fa4ad-5942-7235-93d3-3efebe9b8a12" | |||
| ) | |||
| ) | |||
| done = False | |||
| while not done: | |||
| actions, finished = policy.select_action(observation) | |||
| observation, reward, terminated, truncated, info = env.step(actions) | |||
| if terminated: | |||
| print(observation, reward, terminated, truncated, info, flush=True) | |||
| done = terminated | truncated | done | finished | |||
| env.close() | |||
+ 31
- 0
examples/aloha/nodes/keyboard_node.py
View File
| @@ -0,0 +1,31 @@ | |||
| from pynput import keyboard | |||
| from pynput.keyboard import Key, Events | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| node = Node() | |||
| buffer_text = "" | |||
| space = False | |||
| submitted_text = [] | |||
| cursor = -1 | |||
| with keyboard.Events() as events: | |||
| while True: | |||
| event = events.get(0.1) | |||
| if event is not None and isinstance(event, Events.Press): | |||
| if event.key == Key.space and space == False: | |||
| cursor += 1 | |||
| node.send_output("space", pa.array([cursor])) | |||
| space = True | |||
| elif event is not None and isinstance(event, Events.Release): | |||
| if event.key == Key.space: | |||
| node.send_output("space", pa.array([-1])) | |||
| space = False | |||
| elif event.key == Key.backspace: | |||
| node.send_output("failed", pa.array([cursor])) | |||
| if node.next(0.001) is None: | |||
| break | |||
+ 78
- 0
examples/aloha/nodes/lerobot_webcam_saver.py
View File
| @@ -0,0 +1,78 @@ | |||
| #!/usr/bin/env python3 | |||
| # -*- coding: utf-8 -*- | |||
| import os | |||
| import time | |||
| import numpy as np | |||
| import cv2 | |||
| import pyarrow as pa | |||
| from pathlib import Path | |||
| from dora import Node | |||
| import subprocess | |||
| node = Node() | |||
| CAMERA_NAME = os.getenv("CAMERA_NAME", "camera") | |||
| CAMERA_WIDTH = 640 | |||
| CAMERA_HEIGHT = 480 | |||
| FPS = 30 | |||
| i = 0 | |||
| episode = -1 | |||
| dataflow_id = node.dataflow_id() | |||
| BASE = Path("out") / dataflow_id / "videos" | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| if event["id"] == "record_episode": | |||
| record_episode = event["value"].to_numpy()[0] | |||
| print(f"Recording episode {record_episode}", flush=True) | |||
| # Save Episode Video | |||
| if episode != -1 and record_episode == -1: | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| video_path = BASE / fname | |||
| # Save video | |||
| ffmpeg_cmd = ( | |||
| f"ffmpeg -r {FPS} " | |||
| "-f image2 " | |||
| "-loglevel error " | |||
| f"-i {str(out_dir / 'frame_%06d.png')} " | |||
| "-vcodec libx264 " | |||
| "-g 2 " | |||
| "-pix_fmt yuv444p " | |||
| f"{str(video_path)} &&" | |||
| f"rm -r {str(out_dir)}" | |||
| ) | |||
| print(ffmpeg_cmd, flush=True) | |||
| subprocess.Popen([ffmpeg_cmd], start_new_session=True, shell=True) | |||
| episode = record_episode | |||
| # Make new directory and start saving images | |||
| elif episode == -1 and record_episode != -1: | |||
| episode = record_episode | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| out_dir.mkdir(parents=True, exist_ok=True) | |||
| i = 0 | |||
| else: | |||
| continue | |||
| elif event["id"] == "image": | |||
| # Only record image when in episode. | |||
| # Episode 0 is for not recording periods. | |||
| if episode == -1: | |||
| continue | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| node.send_output( | |||
| "saved_image", | |||
| pa.array([{"path": f"videos/{fname}", "timestamp": i / FPS}]), | |||
| event["metadata"], | |||
| ) | |||
| image = event["value"].to_numpy().reshape((CAMERA_HEIGHT, CAMERA_WIDTH, 3)) | |||
| path = str(out_dir / f"frame_{i:06d}.png") | |||
| cv2.imwrite(path, image) | |||
| i += 1 | |||
+ 234
- 0
examples/aloha/nodes/llm_op.py
View File
| @@ -0,0 +1,234 @@ | |||
| from dora import DoraStatus | |||
| import pylcs | |||
| import os | |||
| import pyarrow as pa | |||
| from transformers import AutoModelForCausalLM, AutoTokenizer | |||
| import torch | |||
| import gc # garbage collect library | |||
| import re | |||
| import time | |||
| CHATGPT = False | |||
| MODEL_NAME_OR_PATH = "TheBloke/deepseek-coder-6.7B-instruct-GPTQ" | |||
| CODE_MODIFIER_TEMPLATE = """ | |||
| ### Instruction | |||
| Respond with one block of modified code only in ```python block. No explanation. | |||
| ```python | |||
| {code} | |||
| ``` | |||
| {user_message} | |||
| ### Response: | |||
| """ | |||
| model = AutoModelForCausalLM.from_pretrained( | |||
| MODEL_NAME_OR_PATH, | |||
| device_map="auto", | |||
| trust_remote_code=True, | |||
| revision="main", | |||
| max_length=1024, | |||
| ).to("cuda:0") | |||
| tokenizer = AutoTokenizer.from_pretrained(MODEL_NAME_OR_PATH, use_fast=True) | |||
| def extract_python_code_blocks(text): | |||
| """ | |||
| Extracts Python code blocks from the given text that are enclosed in triple backticks with a python language identifier. | |||
| Parameters: | |||
| - text: A string that may contain one or more Python code blocks. | |||
| Returns: | |||
| - A list of strings, where each string is a block of Python code extracted from the text. | |||
| """ | |||
| pattern = r"```python\n(.*?)\n```" | |||
| matches = re.findall(pattern, text, re.DOTALL) | |||
| if len(matches) == 0: | |||
| pattern = r"```python\n(.*?)(?:\n```|$)" | |||
| matches = re.findall(pattern, text, re.DOTALL) | |||
| if len(matches) == 0: | |||
| return [text] | |||
| else: | |||
| matches = [remove_last_line(matches[0])] | |||
| return matches | |||
| def remove_last_line(python_code): | |||
| """ | |||
| Removes the last line from a given string of Python code. | |||
| Parameters: | |||
| - python_code: A string representing Python source code. | |||
| Returns: | |||
| - A string with the last line removed. | |||
| """ | |||
| lines = python_code.split("\n") # Split the string into lines | |||
| if lines: # Check if there are any lines to remove | |||
| lines.pop() # Remove the last line | |||
| return "\n".join(lines) # Join the remaining lines back into a string | |||
| def calculate_similarity(source, target): | |||
| """ | |||
| Calculate a similarity score between the source and target strings. | |||
| This uses the edit distance relative to the length of the strings. | |||
| """ | |||
| edit_distance = pylcs.edit_distance(source, target) | |||
| max_length = max(len(source), len(target)) | |||
| # Normalize the score by the maximum possible edit distance (the length of the longer string) | |||
| similarity = 1 - (edit_distance / max_length) | |||
| return similarity | |||
| def find_best_match_location(source_code, target_block): | |||
| """ | |||
| Find the best match for the target_block within the source_code by searching line by line, | |||
| considering blocks of varying lengths. | |||
| """ | |||
| source_lines = source_code.split("\n") | |||
| target_lines = target_block.split("\n") | |||
| best_similarity = 0 | |||
| best_start_index = 0 | |||
| best_end_index = -1 | |||
| # Iterate over the source lines to find the best matching range for all lines in target_block | |||
| for start_index in range(len(source_lines) - len(target_lines) + 1): | |||
| for end_index in range(start_index + len(target_lines), len(source_lines) + 1): | |||
| current_window = "\n".join(source_lines[start_index:end_index]) | |||
| current_similarity = calculate_similarity(current_window, target_block) | |||
| if current_similarity > best_similarity: | |||
| best_similarity = current_similarity | |||
| best_start_index = start_index | |||
| best_end_index = end_index | |||
| # Convert line indices back to character indices for replacement | |||
| char_start_index = len("\n".join(source_lines[:best_start_index])) + ( | |||
| 1 if best_start_index > 0 else 0 | |||
| ) | |||
| char_end_index = len("\n".join(source_lines[:best_end_index])) | |||
| return char_start_index, char_end_index | |||
| def replace_code_in_source(source_code, replacement_block: str): | |||
| """ | |||
| Replace the best matching block in the source_code with the replacement_block, considering variable block lengths. | |||
| """ | |||
| replacement_block = extract_python_code_blocks(replacement_block)[0] | |||
| start_index, end_index = find_best_match_location(source_code, replacement_block) | |||
| if start_index != -1 and end_index != -1: | |||
| # Replace the best matching part with the replacement block | |||
| new_source = ( | |||
| source_code[:start_index] + replacement_block + source_code[end_index:] | |||
| ) | |||
| return new_source | |||
| else: | |||
| return source_code | |||
| class Operator: | |||
| def __init__(self) -> None: | |||
| self.policy_init = False | |||
| def on_event( | |||
| self, | |||
| dora_event, | |||
| send_output, | |||
| ) -> DoraStatus: | |||
| global model, tokenizer | |||
| if dora_event["type"] == "INPUT" and dora_event["id"] == "text": | |||
| input = dora_event["value"][0].as_py() | |||
| # Path to the current file | |||
| current_file_path = __file__ | |||
| # Directory of the current file | |||
| current_directory = os.path.dirname(current_file_path) | |||
| path = current_directory + "/policy.py" | |||
| with open(path, "r", encoding="utf8") as f: | |||
| code = f.read() | |||
| user_message = input | |||
| start_llm = time.time() | |||
| output = self.ask_llm( | |||
| CODE_MODIFIER_TEMPLATE.format(code=code, user_message=user_message) | |||
| ) | |||
| source_code = replace_code_in_source(code, output) | |||
| print("response time:", time.time() - start_llm, flush=True) | |||
| print("response: ", output, flush=True) | |||
| with open(path, "w") as file: | |||
| file.write(source_code) | |||
| gc.collect() | |||
| torch.cuda.empty_cache() | |||
| return DoraStatus.CONTINUE | |||
| def ask_llm(self, prompt): | |||
| # Generate output | |||
| # prompt = PROMPT_TEMPLATE.format(system_message=system_message, prompt=prompt)) | |||
| input = tokenizer(prompt, return_tensors="pt") | |||
| input_ids = input.input_ids.cuda() | |||
| # add attention mask here | |||
| attention_mask = input.attention_mask.cuda() | |||
| output = model.generate( | |||
| inputs=input_ids, | |||
| temperature=0.7, | |||
| do_sample=True, | |||
| top_p=0.95, | |||
| top_k=40, | |||
| max_new_tokens=512, | |||
| attention_mask=attention_mask, | |||
| eos_token_id=tokenizer.eos_token_id, | |||
| ) | |||
| # Get the tokens from the output, decode them, print them | |||
| # Get text between im_start and im_end | |||
| return tokenizer.decode(output[0], skip_special_tokens=True)[len(prompt) :] | |||
| if __name__ == "__main__": | |||
| op = Operator() | |||
| # Path to the current file | |||
| current_file_path = __file__ | |||
| # Directory of the current file | |||
| current_directory = os.path.dirname(current_file_path) | |||
| path = current_directory + "/policy.py" | |||
| with open(path, "r", encoding="utf8") as f: | |||
| raw = f.read() | |||
| op.on_event( | |||
| { | |||
| "type": "INPUT", | |||
| "id": "text", | |||
| "value": pa.array( | |||
| [ | |||
| { | |||
| "path": path, | |||
| "user_message": "When I say suit up, get the hat and the get the food.", | |||
| }, | |||
| ] | |||
| ), | |||
| "metadata": [], | |||
| }, | |||
| print, | |||
| ) | |||
+ 53
- 0
examples/aloha/nodes/plot_node.py
View File
| @@ -0,0 +1,53 @@ | |||
| import os | |||
| import cv2 | |||
| from dora import Node | |||
| IMAGE_WIDTH = int(os.getenv("IMAGE_WIDTH", "1280")) | |||
| IMAGE_HEIGHT = int(os.getenv("IMAGE_HEIGHT", "720")) | |||
| FONT = cv2.FONT_HERSHEY_SIMPLEX | |||
| node = Node() | |||
| joint = None | |||
| text = None | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| dora_id = event["id"] | |||
| if dora_id == "position": | |||
| joint = event["value"].to_numpy() | |||
| if "text" in dora_id: | |||
| text = event["value"][0].as_py() | |||
| if dora_id == "image": | |||
| image = ( | |||
| event["value"].to_numpy().reshape((IMAGE_HEIGHT, IMAGE_WIDTH, 3)).copy() | |||
| ) | |||
| if text is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"Speech: {text}", | |||
| (20, 40), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 0), | |||
| 2, | |||
| ) | |||
| if joint is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"pos: {joint}", | |||
| (20, 20), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 100), | |||
| 2, | |||
| ) | |||
| cv2.imshow("frame", image) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
+ 17
- 0
examples/aloha/nodes/policy.py
View File
| @@ -0,0 +1,17 @@ | |||
| import pyarrow as pa | |||
| from dora import DoraStatus | |||
| class Operator: | |||
| def __init__(self): | |||
| self.actions = ["get_food", "get_hat"] | |||
| def on_event(self, event: dict, send_output) -> DoraStatus: | |||
| if event["type"] == "INPUT": | |||
| id = event["id"] | |||
| # On initialization | |||
| if id == "speech": | |||
| text: str = event["value"][0].as_py().lower() | |||
| # send_output("action", pa.array([""])) | |||
| return DoraStatus.CONTINUE | |||
+ 28
- 0
examples/aloha/nodes/realsense_node.py
View File
| @@ -0,0 +1,28 @@ | |||
| import pyrealsense2 as rs | |||
| import numpy as np | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| import os | |||
| import cv2 | |||
| IMAGE_WIDTH = int(os.getenv("IMAGE_WIDTH", "640")) | |||
| IMAGE_HEIGHT = int(os.getenv("IMAGE_HEIGHT", "480")) | |||
| FPS = 30 | |||
| CAMERA_ID = os.getenv("CAMERA_ID") | |||
| print("camera ID:", CAMERA_ID) | |||
| pipe = rs.pipeline() | |||
| config = rs.config() | |||
| config.enable_device(CAMERA_ID) | |||
| config.enable_stream(rs.stream.color, IMAGE_WIDTH, IMAGE_HEIGHT, rs.format.bgr8, FPS) | |||
| profile = pipe.start(config) | |||
| node = Node() | |||
| for event in node: | |||
| frames = pipe.wait_for_frames() | |||
| color_frame = frames.get_color_frame() | |||
| color_images = np.asanyarray(color_frame.get_data()) | |||
| node.send_output("image", pa.array(color_images.ravel())) | |||
| cv2.imshow(CAMERA_ID, color_images) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
+ 27
- 0
examples/aloha/nodes/replay.py
View File
| @@ -0,0 +1,27 @@ | |||
| from dora import Node | |||
| import pandas as pd | |||
| import pyarrow as pa | |||
| import time | |||
| TOPIC = "puppet_goal_position" | |||
| if __name__ == "__main__": | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| for action in event["value"]: | |||
| print(action, flush=True) | |||
| action = action.as_py() | |||
| df = pd.read_parquet(action + ".parquet") | |||
| initial_time = df["timestamp_utc"].iloc[0] | |||
| current_time = initial_time | |||
| for index, row in df.iterrows(): | |||
| delta_time = (row["timestamp_utc"] - current_time).microseconds | |||
| current_time = row["timestamp_utc"] | |||
| time.sleep(delta_time / 1_000_000) | |||
| node.send_output(TOPIC, pa.array(row[TOPIC], type=pa.uint32())) | |||
+ 45
- 0
examples/aloha/nodes/webcam.py
View File
| @@ -0,0 +1,45 @@ | |||
| #!/usr/bin/env python3 | |||
| # -*- coding: utf-8 -*- | |||
| import os | |||
| import time | |||
| import numpy as np | |||
| import cv2 | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| node = Node() | |||
| CAMERA_ID = int(os.getenv("CAMERA_ID", 0)) | |||
| CAMERA_WIDTH = 640 | |||
| CAMERA_HEIGHT = 480 | |||
| video_capture = cv2.VideoCapture(CAMERA_ID) | |||
| font = cv2.FONT_HERSHEY_SIMPLEX | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| ret, frame = video_capture.read() | |||
| if not ret: | |||
| frame = np.zeros((CAMERA_HEIGHT, CAMERA_WIDTH, 3), dtype=np.uint8) | |||
| cv2.putText( | |||
| frame, | |||
| "No Webcam was found at index %d" % (CAMERA_ID), | |||
| (int(30), int(30)), | |||
| font, | |||
| 0.75, | |||
| (255, 255, 255), | |||
| 2, | |||
| 1, | |||
| ) | |||
| node.send_output( | |||
| "image", | |||
| pa.array(frame.ravel()), | |||
| event["metadata"], | |||
| ) | |||
| cv2.imshow(str(CAMERA_ID), frame) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
| video_capture.release() | |||
+ 59
- 0
examples/aloha/nodes/whisper_node.py
View File
| @@ -0,0 +1,59 @@ | |||
| import pyarrow as pa | |||
| import whisper | |||
| from pynput import keyboard | |||
| from pynput.keyboard import Key, Events | |||
| from dora import Node | |||
| import torch | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| import sounddevice as sd | |||
| import gc # garbage collect library | |||
| model = whisper.load_model("base") | |||
| SAMPLE_RATE = 16000 | |||
| node = Node() | |||
| def get_text(duration) -> str: | |||
| ## Microphone | |||
| audio_data = sd.rec( | |||
| int(SAMPLE_RATE * duration), | |||
| samplerate=SAMPLE_RATE, | |||
| channels=1, | |||
| dtype=np.int16, | |||
| blocking=True, | |||
| ) | |||
| audio = audio_data.ravel().astype(np.float32) / 32768.0 | |||
| ## Speech to text | |||
| audio = whisper.pad_or_trim(audio) | |||
| return model.transcribe(audio, language="en") | |||
| ## Check for keyboard event | |||
| with keyboard.Events() as events: | |||
| for dora_event in node: | |||
| if dora_event["type"] == "INPUT": | |||
| event = events.get(0.1) | |||
| if ( | |||
| event is not None | |||
| and (event.key == Key.alt_r or event.key == Key.ctrl_r) | |||
| and isinstance(event, Events.Press) | |||
| ): | |||
| if event.key == Key.alt_r: | |||
| result = get_text(5) | |||
| node.send_output( | |||
| "text_llm", pa.array([result["text"]]), dora_event["metadata"] | |||
| ) | |||
| elif event.key == Key.ctrl_r: | |||
| result = get_text(3) | |||
| node.send_output( | |||
| "text_policy", | |||
| pa.array([result["text"]]), | |||
| dora_event["metadata"], | |||
| ) | |||
+ 24
- 0
examples/aloha/tests/test_realsense.py
View File
| @@ -0,0 +1,24 @@ | |||
| import pyrealsense2 as rs | |||
| import cv2 | |||
| import numpy as np | |||
| import os | |||
| CAMERA_ID = os.getenv("CAMERA_ID") | |||
| pipe = rs.pipeline() | |||
| config = rs.config() | |||
| config.enable_device(CAMERA_ID) | |||
| config.enable_stream(rs.stream.color, 640, 480, rs.format.rgb8, 60) | |||
| profile = pipe.start(config) | |||
| try: | |||
| for i in range(0, 1000): | |||
| frames = pipe.wait_for_frames() | |||
| color_frame = frames.get_color_frame() | |||
| color_images = np.asanyarray(color_frame.get_data()) | |||
| color_images = cv2.cvtColor(color_images, cv2.COLOR_BGR2RGB) | |||
| cv2.imshow("frame", color_images) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
| finally: | |||
| pipe.stop() | |||
+ 63
- 0
examples/lebai/graphs/dataflow.yml
View File
| @@ -0,0 +1,63 @@ | |||
| nodes: | |||
| - id: lebai-client | |||
| build: pip install -e ../../../node-hub/lebai-client | |||
| path: lebai-client | |||
| inputs: | |||
| movec: | |||
| source: interpolation/movec | |||
| queue_size: 1 | |||
| movej: | |||
| source: interpolation/movej | |||
| queue_size: 1 | |||
| claw: interpolation/claw | |||
| stop: interpolation/stop | |||
| save: interpolation/save | |||
| go_to: interpolation/go_to | |||
| record: interpolation/record | |||
| cut: interpolation/cut | |||
| play: interpolation/play | |||
| teach: interpolation/teach | |||
| end_teach: interpolation/end_teach | |||
| - id: keyboard-listener | |||
| build: pip install -e ../../../../dora/node-hub/keyboard-listener | |||
| path: keyboard-listener | |||
| outputs: | |||
| - char | |||
| - id: dora-microphone | |||
| build: pip install -e ../../../../dora/node-hub/dora-microphone | |||
| path: dora-microphone | |||
| outputs: | |||
| - audio | |||
| - id: dora-distil-whisper | |||
| build: pip install -e ../../../../dora/node-hub/dora-distil-whisper | |||
| path: dora-distil-whisper | |||
| inputs: | |||
| input: dora-microphone/audio | |||
| outputs: | |||
| - text | |||
| - id: terminal-print | |||
| path: dynamic | |||
| inputs: | |||
| text: dora-distil-whisper/text | |||
| - id: interpolation | |||
| path: ../nodes/interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| text: dora-distil-whisper/text | |||
| outputs: | |||
| - movec | |||
| - movej | |||
| - claw | |||
| - stop | |||
| - save | |||
| - record | |||
| - play | |||
| - go_to | |||
| - cut | |||
| - teach | |||
| - end_teach | |||
+ 128
- 0
examples/lebai/graphs/dataflow_full.yml
View File
| @@ -0,0 +1,128 @@ | |||
| nodes: | |||
| - id: lebai-client | |||
| build: pip install -e ../../../node-hub/lebai-client | |||
| path: lebai-client | |||
| inputs: | |||
| movec: | |||
| source: interpolation/movec | |||
| queue_size: 1 | |||
| movej: | |||
| source: interpolation/movej | |||
| queue_size: 1 | |||
| claw: interpolation/claw | |||
| stop: interpolation/stop | |||
| save: interpolation/save | |||
| go_to: interpolation/go_to | |||
| record: interpolation/record | |||
| cut: interpolation/cut | |||
| play: interpolation/play | |||
| teach: interpolation/teach | |||
| end_teach: interpolation/end_teach | |||
| - id: keyboard-listener | |||
| build: pip install dora-keyboard | |||
| path: dora-keyboard | |||
| outputs: | |||
| - char | |||
| - id: dora-microphone | |||
| build: pip install dora-microphone | |||
| path: dora-microphone | |||
| outputs: | |||
| - audio | |||
| - id: dora-distil-whisper | |||
| build: pip install dora-distil-whisper | |||
| path: dora-distil-whisper | |||
| inputs: | |||
| input: dora-microphone/audio | |||
| outputs: | |||
| - text | |||
| - id: key-interpolation | |||
| path: ../nodes/key_interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| outputs: | |||
| - text | |||
| - id: interpolation | |||
| path: ../nodes/interpolation.py | |||
| inputs: | |||
| # keyboard: keyboard-listener/char | |||
| # text: dora-distil-whisper/text | |||
| vlm: dora-qwenvl/text | |||
| text: dora-qwenvl-recorder/text | |||
| outputs: | |||
| - movec | |||
| - movej | |||
| - claw | |||
| - stop | |||
| - save | |||
| - record | |||
| - play | |||
| - go_to | |||
| - cut | |||
| - teach | |||
| - end_teach | |||
| - id: camera | |||
| build: pip install opencv-video-capture | |||
| path: opencv-video-capture | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| text_vlm: dora-qwenvl/text | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl-recorder | |||
| build: pip install -e ../../../dora/node-hub/llama-factory-recorder | |||
| path: llama-factory-recorder | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| ground_truth: key-interpolation/text | |||
| outputs: | |||
| - text | |||
| env: | |||
| DEFAULT_QUESTION: Respond with left, right, forward, back, up or go home in order for the robotic arm to get the cup. | |||
| LLAMA_FACTORY_ROOT_PATH: /home/peter/Documents/work/LLaMA-Factory/data | |||
| - id: dora-qwenvl | |||
| build: pip install -e ../../../dora/node-hub/dora-qwenvl | |||
| path: dora-qwenvl | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| tick: | |||
| source: key-interpolation/text | |||
| queue_size: 1 | |||
| text: terminal-input/data | |||
| outputs: | |||
| - text | |||
| env: | |||
| CUSTOM_MODEL_PATH: /home/peter/Documents/work/LLaMA-Factory/saves/qwen2_vl-2b/lora-dora-demo/sft | |||
| DEFAULT_QUESTION: Respond with left, right, forward, back, up or go home in order for the robotic arm to get the cup. | |||
| - id: terminal-input | |||
| build: pip install ../../node-hub/terminal-input | |||
| path: dynamic | |||
| outputs: | |||
| - data | |||
+ 88
- 0
examples/lebai/graphs/keyboard_teleop.yml
View File
| @@ -0,0 +1,88 @@ | |||
| nodes: | |||
| - id: lebai-client | |||
| build: pip install -e ../../../node-hub/lebai-client | |||
| path: lebai-client | |||
| inputs: | |||
| movec: | |||
| source: interpolation/movec | |||
| queue_size: 1 | |||
| movej: | |||
| source: interpolation/movej | |||
| queue_size: 1 | |||
| claw: interpolation/claw | |||
| stop: interpolation/stop | |||
| save: interpolation/save | |||
| go_to: interpolation/go_to | |||
| record: interpolation/record | |||
| cut: interpolation/cut | |||
| play: interpolation/play | |||
| teach: interpolation/teach | |||
| end_teach: interpolation/end_teach | |||
| - id: keyboard-listener | |||
| build: pip install dora-keyboard | |||
| path: dora-keyboard | |||
| outputs: | |||
| - char | |||
| - id: key-interpolation | |||
| path: ../nodes/key_interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| outputs: | |||
| - text | |||
| - id: interpolation | |||
| path: ../nodes/interpolation.py | |||
| inputs: | |||
| text: dora-qwenvl-recorder/text | |||
| outputs: | |||
| - movec | |||
| - movej | |||
| - claw | |||
| - stop | |||
| - save | |||
| - record | |||
| - play | |||
| - go_to | |||
| - cut | |||
| - teach | |||
| - end_teach | |||
| - id: camera | |||
| build: pip install opencv-video-capture | |||
| path: opencv-video-capture | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| text_vlm: dora-qwenvl-recorder/text | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl-recorder | |||
| build: pip install -e ../../../dora/node-hub/llama-factory-recorder | |||
| path: llama-factory-recorder | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| ground_truth: key-interpolation/text | |||
| outputs: | |||
| - text | |||
| env: | |||
| DEFAULT_QUESTION: Respond with left, right, forward, back, up or go home in order for the robotic arm to get the cup. | |||
| LLAMA_FACTORY_ROOT_PATH: /home/peter/Documents/work/LLaMA-Factory | |||
+ 115
- 0
examples/lebai/graphs/qwenvl2.yml
View File
| @@ -0,0 +1,115 @@ | |||
| nodes: | |||
| - id: lebai-client | |||
| build: pip install -e ../../../node-hub/lebai-client | |||
| path: lebai-client | |||
| inputs: | |||
| movec: | |||
| source: interpolation/movec | |||
| queue_size: 1 | |||
| movej: | |||
| source: interpolation/movej | |||
| queue_size: 1 | |||
| claw: interpolation/claw | |||
| stop: interpolation/stop | |||
| save: interpolation/save | |||
| go_to: interpolation/go_to | |||
| record: interpolation/record | |||
| cut: interpolation/cut | |||
| play: interpolation/play | |||
| teach: interpolation/teach | |||
| end_teach: interpolation/end_teach | |||
| - id: keyboard-listener | |||
| build: pip install dora-keyboard | |||
| path: dora-keyboard | |||
| outputs: | |||
| - char | |||
| - id: dora-microphone | |||
| build: pip install dora-microphone | |||
| path: dora-microphone | |||
| outputs: | |||
| - audio | |||
| - id: dora-distil-whisper | |||
| build: pip install dora-distil-whisper | |||
| path: dora-distil-whisper | |||
| inputs: | |||
| input: dora-microphone/audio | |||
| outputs: | |||
| - text | |||
| - id: key-interpolation | |||
| path: ../nodes/key_interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| outputs: | |||
| - text | |||
| - id: prompt-interpolation | |||
| path: ../nodes/prompt_interpolation.py | |||
| inputs: | |||
| text: dora-distil-whisper/text | |||
| outputs: | |||
| - text | |||
| - id: interpolation | |||
| path: ../nodes/interpolation.py | |||
| inputs: | |||
| keyboard: key-interpolation/text | |||
| vlm: dora-qwenvl/tick | |||
| outputs: | |||
| - movec | |||
| - movej | |||
| - claw | |||
| - stop | |||
| - save | |||
| - record | |||
| - play | |||
| - go_to | |||
| - cut | |||
| - teach | |||
| - end_teach | |||
| - id: camera | |||
| build: pip install opencv-video-capture | |||
| path: opencv-video-capture | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| text_vlm: dora-qwenvl/tick | |||
| text_whisper: dora-distil-whisper/text | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl | |||
| build: pip install -e ../../../dora/node-hub/dora-qwenvl | |||
| path: dora-qwenvl | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| tick: | |||
| source: key-interpolation/text | |||
| queue_size: 1 | |||
| text: prompt-interpolation/text | |||
| outputs: | |||
| - text | |||
| - tick | |||
| env: | |||
| CUSTOM_MODEL_PATH: /home/peter/Documents/work/LLaMA-Factory/saves/qwen2_vl-2b/lora-dora-demo/sft | |||
| DEFAULT_QUESTION: Respond with left, right, forward, back, up, down or go home in order for the robotic arm to get the cup. | |||
+ 1
- 0
examples/lebai/graphs/train.sh
View File
| @@ -0,0 +1 @@ | |||
| D | |||
+ 96
- 0
examples/lebai/graphs/voice_teleop.yml
View File
| @@ -0,0 +1,96 @@ | |||
| nodes: | |||
| - id: lebai-client | |||
| build: pip install -e ../../../node-hub/lebai-client | |||
| path: lebai-client | |||
| inputs: | |||
| movec: | |||
| source: interpolation/movec | |||
| queue_size: 1 | |||
| movej: | |||
| source: interpolation/movej | |||
| queue_size: 1 | |||
| claw: interpolation/claw | |||
| stop: interpolation/stop | |||
| save: interpolation/save | |||
| go_to: interpolation/go_to | |||
| record: interpolation/record | |||
| cut: interpolation/cut | |||
| play: interpolation/play | |||
| teach: interpolation/teach | |||
| end_teach: interpolation/end_teach | |||
| - id: dora-microphone | |||
| build: pip install dora-microphone | |||
| path: dora-microphone | |||
| outputs: | |||
| - audio | |||
| - id: dora-distil-whisper | |||
| build: pip install dora-distil-whisper | |||
| path: dora-distil-whisper | |||
| inputs: | |||
| input: dora-microphone/audio | |||
| outputs: | |||
| - text | |||
| - id: voice-interpolation | |||
| path: ../nodes/voice_interpolation.py | |||
| inputs: | |||
| text: dora-distil-whisper/text | |||
| outputs: | |||
| - text | |||
| - id: interpolation | |||
| path: ../nodes/interpolation.py | |||
| inputs: | |||
| text: dora-qwenvl-recorder/text | |||
| outputs: | |||
| - movec | |||
| - movej | |||
| - claw | |||
| - stop | |||
| - save | |||
| - record | |||
| - play | |||
| - go_to | |||
| - cut | |||
| - teach | |||
| - end_teach | |||
| - id: camera | |||
| build: pip install opencv-video-capture | |||
| path: opencv-video-capture | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| text_vlm: dora-qwenvl-recorder/text | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl-recorder | |||
| build: pip install -e ../../../dora/node-hub/llama-factory-recorder | |||
| path: llama-factory-recorder | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| ground_truth: voice-interpolation/text | |||
| outputs: | |||
| - text | |||
| env: | |||
| DEFAULT_QUESTION: Respond with left, right, forward, back, up or go home in order for the robotic arm to get the cup. | |||
| LLAMA_FACTORY_ROOT_PATH: /home/peter/Documents/work/LLaMA-Factory | |||
+ 60
- 0
examples/lebai/nodes/interpolation.py
View File
| @@ -0,0 +1,60 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| from enum import Enum | |||
| node = Node() | |||
| class Action(Enum): | |||
| """ | |||
| Action abstraction | |||
| """ | |||
| YAW_RIGHT = ("yaw right", "movej", [0, 0, 0, 0, -0.1, 0, 0.1]) | |||
| YAW_LEFT = ("yaw left", "movej", [0, 0, 0, 0, 0.1, 0, 0.1]) | |||
| PITCH_UP = ("pitch up", "movej", [0, 0, 0, -0.1, 0, 0, 0.1]) | |||
| PITCH_DOWN = ("pitch down", "movej", [0, 0, 0.1, 0, 0, 0, 0.1]) | |||
| ROLL_LEFT = ("roll left", "movej", [0, 0, 0, 0, 0, 0.1, 0.1]) | |||
| ROLL_RIGHT = ("roll right", "movej", [0, 0, 0, 0, 0, -0.1, 0.1]) | |||
| YAW_SHOULDER_RIGHT = ( | |||
| "yaw shoulder right", | |||
| "movej", | |||
| [-0.1, 0, 0, 0, 0, 0, 0.1], | |||
| ) | |||
| YAW_SHOULDER_LEFT = ( | |||
| "yaw shoulder left", | |||
| "movej", | |||
| [0.1, 0, 0, 0, 0, 0, 0.1], | |||
| ) | |||
| FORWARD = ("forward", "movec", [-0.02, 0, 0, 0, 0, 0, 0.1]) | |||
| BACK = ("back", "movec", [0.02, 0, 0, 0, 0, 0, 0.1]) | |||
| LEFT = ("left", "movec", [0, -0.02, 0, 0, 0, 0, 0.1]) | |||
| RIGHT = ("right", "movec", [0, 0.02, 0, 0, 0, 0, 0.1]) | |||
| UP = ("up", "movec", [0, 0, 0.02, 0, 0, 0, 0.1]) | |||
| DOWN = ("down", "movec", [0, 0, -0.02, 0, 0, 0, 0.1]) | |||
| CLOSE = ("close", "claw", [0]) | |||
| OPEN = ("open", "claw", [100]) | |||
| STOP = ("stop", "stop", []) | |||
| SAVE = ("save", "save", []) | |||
| GO_TO = ("go", "go_to", []) | |||
| END_TEACH = ("end of teach", "end_teach", []) | |||
| TEACH = ("teach", "teach", []) | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| text = event["value"][0].as_py().lower() | |||
| text = text.replace(".", "") | |||
| text = text.replace(".", "") | |||
| if "save" in text: | |||
| node.send_output("save", pa.array([text.replace("save ", "")])) | |||
| elif "go" in text: | |||
| node.send_output("go_to", pa.array([text.replace("go ", "")])) | |||
| elif "go to " in text: | |||
| node.send_output("go_to", pa.array([text.replace("go to ", "")])) | |||
| else: | |||
| for action in Action: | |||
| if action.value[0] in text: | |||
| node.send_output(action.value[1], pa.array(action.value[2])) | |||
| break | |||
+ 49
- 0
examples/lebai/nodes/key_interpolation.py
View File
| @@ -0,0 +1,49 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| if event["id"] == "keyboard": | |||
| char = event["value"][0].as_py() | |||
| if char == "w": | |||
| node.send_output("text", pa.array(["forward"])) | |||
| elif char == "s": | |||
| node.send_output("text", pa.array(["back"])) | |||
| elif char == "c": | |||
| node.send_output("text", pa.array([" go home"])) | |||
| elif char == "d": | |||
| node.send_output("text", pa.array(["right"])) | |||
| elif char == "a": | |||
| node.send_output("text", pa.array(["left"])) | |||
| elif char == "e": | |||
| node.send_output("text", pa.array(["up"])) | |||
| elif char == "q": | |||
| node.send_output("text", pa.array(["down"])) | |||
| elif char == "t": | |||
| node.send_output("text", pa.array(["close"])) | |||
| elif char == "r": | |||
| node.send_output("text", pa.array(["open"])) | |||
| elif char == "6": | |||
| node.send_output("text", pa.array(["yaw right"])) | |||
| elif char == "4": | |||
| node.send_output("text", pa.array(["yaw left"])) | |||
| elif char == "3": | |||
| node.send_output("text", pa.array(["yaw shoulder right"])) | |||
| elif char == "1": | |||
| node.send_output("text", pa.array(["yaw shoulder left"])) | |||
| elif char == "8": | |||
| node.send_output("text", pa.array(["pitch up"])) | |||
| elif char == "2": | |||
| node.send_output("text", pa.array(["pitch down"])) | |||
| elif char == "7": | |||
| node.send_output("text", pa.array(["roll left"])) | |||
| elif char == "9": | |||
| node.send_output("text", pa.array(["roll right"])) | |||
| elif char == "x": | |||
| node.send_output("text", pa.array(["stop"])) | |||
| elif char == "j": | |||
| node.send_output("text", pa.array([""])) | |||
+ 21
- 0
examples/lebai/nodes/prompt_interpolation.py
View File
| @@ -0,0 +1,21 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| if event["id"] == "text": | |||
| text = event["value"][0].as_py() | |||
| text = text.lower() | |||
| if "get" in text: | |||
| node.send_output( | |||
| "text", | |||
| pa.array( | |||
| [ | |||
| "Respond with left, right, forward, back, up, down or go home in order for the robotic arm to " | |||
| + text | |||
| ] | |||
| ), | |||
| ) | |||
+ 1
- 0
examples/lebai/nodes/vlm_prompt.py
View File
| @@ -0,0 +1 @@ | |||
+ 22
- 0
examples/lebai/nodes/voice_interpolation.py
View File
| @@ -0,0 +1,22 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| if event["id"] == "text": | |||
| text = event["value"][0].as_py() | |||
| text = text.lower() | |||
| text = text.replace("saving", "save") | |||
| text = text.replace("teaching", "teach") | |||
| text = text.replace("turning left", "yaw left") | |||
| text = text.replace("turning right", "yaw right") | |||
| text = text.replace("turning up", "pitch up") | |||
| text = text.replace("turning down", "pitch down") | |||
| text = text.replace("rolling right", "roll right") | |||
| text = text.replace("rolling left", "roll left") | |||
| text = text.replace("turning shoulder right", "yaw shoulder right") | |||
| text = text.replace("turning shoulder left", "yaw shoulder left") | |||
| node.send_output("text", pa.array([text])) | |||
+ 103
- 0
examples/reachy/README.md
View File
| @@ -0,0 +1,103 @@ | |||
| ## Reachy 2 | |||
| ### Installation | |||
| #### Installation SDK | |||
| ```bash | |||
| ### Install the sdk | |||
| git clone https://github.com/pollen-robotics/reachy2-sdk | |||
| cd reachy2-sdk | |||
| pip install -e . | |||
| cd .. | |||
| ### Connect Camera USB | |||
| echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules | |||
| sudo udevadm control --reload-rules && sudo udevadm trigger | |||
| ### Install Polen vision | |||
| git clone https://github.com/pollen-robotics/pollen-vision.git | |||
| cd pollen-vision | |||
| git checkout lerobot_only_left_camera | |||
| pip install ".[depthai_wrapper]" | |||
| cd .. | |||
| ### Teleoperation Collector | |||
| git clone https://github.com/pollen-robotics/reachy2_hdf5_recorder/ | |||
| ``` | |||
| #### Installation dora | |||
| ```bash | |||
| ## Create new python environment | |||
| git clone git@github.com:huggingface/dora_lerobot.git | |||
| pip install -e dora_lerobot | |||
| git clone git@github.com:dora-rs/dora-dora_lerobot.git --branch WORKING-REACHY | |||
| pip install -e dora-dora_lerobot/gym_dora | |||
| cargo install dora-rs --locked | |||
| pip install dora-rs | |||
| ``` | |||
| ### AI Pipeline | |||
| ### Data Collection | |||
| ```bash | |||
| cd reachy2_hdf5_recorder | |||
| python3 record_episodes_hdf5.py -n <recording_session_name>_raw -l <epiodes_duration in s> -r <framerate> --robot_ip <robot_ip> | |||
| ``` | |||
| ```bash | |||
| huggingface-cli upload \ | |||
| <hf-organisation>/<dataset_name> \ | |||
| data/<recording_session_name>_raw/ \ | |||
| --repo-type dataset (--private) | |||
| ``` | |||
| > ### 06/07/2021 | |||
| > | |||
| > As of today, we need to use several branches: | |||
| > | |||
| > - mobile_base : branch 21 # server side, install manually | |||
| > - reachy-sdk-api : branch 116 # server and client side, install manually | |||
| > - mobile-base-sdk : branch 25 # client side, install manually | |||
| > - reachy2-sdk-server : branch 135 # server side, install manually | |||
| > Then push to HF hub! | |||
| ### Training | |||
| ```bash | |||
| python dora_lerobot/scripts/train.py \ | |||
| policy=act_real \ | |||
| env=aloha_real \ | |||
| env.task=Reachy-v0 \ | |||
| dataset_repo_id=<org-id>/<data-id< \ | |||
| ``` | |||
| ### Evaluation | |||
| ```bash | |||
| dora start reachy/graphs/eval.yml --attach | |||
| ``` | |||
| ### Reachy Initialization | |||
| ```bash | |||
| ssh bedrock@192.168.1.51 | |||
| ``` | |||
| ```bash | |||
| cd dev_docker | |||
| sudo service stop | |||
| docker compose -f mode/dev.yaml up -d core | |||
| docker exec -it core bash | |||
| # In the docker container | |||
| ros2 launch reachy_bringup reachy.launch.py start_sdk_server:=true | |||
| ``` | |||
+ 86
- 0
examples/reachy/nodes/gym_dora_node.py
View File
| @@ -0,0 +1,86 @@ | |||
| import time | |||
| from pathlib import Path | |||
| import gymnasium as gym | |||
| import pandas as pd | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| import gym_dora # noqa: F401 | |||
| env = gym.make( | |||
| "gym_dora/DoraReachy2-v0", disable_env_checker=True, max_episode_steps=10000 | |||
| ) | |||
| observation = env.reset() | |||
| class ReplayPolicy: | |||
| def __init__(self, example_path, epidode=0): | |||
| df_action = pd.read_parquet(example_path / "action.parquet") | |||
| df_episode_index = pd.read_parquet(example_path / "episode_index.parquet") | |||
| self.df = pd.merge_asof( | |||
| df_action[["timestamp_utc", "action"]], | |||
| df_episode_index[["timestamp_utc", "episode_index"]], | |||
| on="timestamp_utc", | |||
| direction="backward", | |||
| ) | |||
| # self.df["episode_index"] = self.df["episode_index"].map(lambda x: x[0]) | |||
| self.df = self.df[self.df["episode_index"] == epidode] | |||
| self.current_time = self.df["timestamp_utc"].iloc[0] | |||
| self.topic = "action" | |||
| self.index = 0 | |||
| self.finished = False | |||
| def select_action(self, obs): | |||
| if self.index < len(self.df): | |||
| self.index += 1 | |||
| else: | |||
| self.finished = True | |||
| row = self.df.iloc[self.index] | |||
| delta_time = (row["timestamp_utc"] - self.current_time).microseconds | |||
| self.current_time = row["timestamp_utc"] | |||
| if delta_time > 0: | |||
| time.sleep(delta_time / 1_000_000) | |||
| return row[self.topic], self.finished | |||
| class ReplayLeRobotPolicy: | |||
| def __init__(self, episode=21): | |||
| self.index = 0 | |||
| self.finished = False | |||
| # episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_mobile_base") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| self.states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| self.actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| def select_action(self, obs): | |||
| if self.index < len(self.actions): | |||
| self.index += 1 | |||
| else: | |||
| self.finished = True | |||
| # time.sleep(1 / 30) | |||
| return self.actions[self.index].numpy(), self.finished | |||
| # policy = ReplayPolicy( | |||
| # Path( | |||
| # "/home/rcadene/dora-aloha/aloha/graphs/out/018fa076-ad19-7c77-afa4-49f7f072e86f" | |||
| # ) | |||
| # ) | |||
| policy = ReplayLeRobotPolicy() | |||
| done = False | |||
| while not done: | |||
| actions, finished = policy.select_action(observation) | |||
| observation, reward, terminated, truncated, info = env.step(actions) | |||
| # cv2.imshow("frame", observation["pixels"]["cam_trunk"]) | |||
| # if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| # break | |||
| if terminated: | |||
| print(observation, reward, terminated, truncated, info, flush=True) | |||
| done = terminated | truncated | done | finished | |||
| env.close() | |||
+ 31
- 0
examples/reachy/nodes/keyboard_node.py
View File
| @@ -0,0 +1,31 @@ | |||
| from pynput import keyboard | |||
| from pynput.keyboard import Key, Events | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| node = Node() | |||
| buffer_text = "" | |||
| space = False | |||
| submitted_text = [] | |||
| cursor = -1 | |||
| with keyboard.Events() as events: | |||
| while True: | |||
| event = events.get(0.1) | |||
| if event is not None and isinstance(event, Events.Press): | |||
| if event.key == Key.space and space == False: | |||
| cursor += 1 | |||
| node.send_output("space", pa.array([cursor])) | |||
| space = True | |||
| elif event is not None and isinstance(event, Events.Release): | |||
| if event.key == Key.space: | |||
| node.send_output("space", pa.array([-1])) | |||
| space = False | |||
| elif event.key == Key.backspace: | |||
| node.send_output("failed", pa.array([cursor])) | |||
| if node.next(0.001) is None: | |||
| break | |||
+ 78
- 0
examples/reachy/nodes/lerobot_webcam_saver.py
View File
| @@ -0,0 +1,78 @@ | |||
| #!/usr/bin/env python3 | |||
| # -*- coding: utf-8 -*- | |||
| import os | |||
| import time | |||
| import numpy as np | |||
| import cv2 | |||
| import pyarrow as pa | |||
| from pathlib import Path | |||
| from dora import Node | |||
| import subprocess | |||
| node = Node() | |||
| CAMERA_NAME = os.getenv("CAMERA_NAME", "camera") | |||
| CAMERA_WIDTH = 1280 | |||
| CAMERA_HEIGHT = 800 | |||
| FPS = 30 | |||
| i = 0 | |||
| episode = -1 | |||
| dataflow_id = node.dataflow_id() | |||
| BASE = Path("out") / dataflow_id / "videos" | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| if event["id"] == "record_episode": | |||
| record_episode = event["value"].to_numpy()[0] | |||
| print(f"Recording episode {record_episode}", flush=True) | |||
| # Save Episode Video | |||
| if episode != -1 and record_episode == -1: | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| video_path = BASE / fname | |||
| # Save video | |||
| ffmpeg_cmd = ( | |||
| f"ffmpeg -r {FPS} " | |||
| "-f image2 " | |||
| "-loglevel error " | |||
| f"-i {str(out_dir / 'frame_%06d.png')} " | |||
| "-vcodec libx264 " | |||
| "-g 2 " | |||
| "-pix_fmt yuv444p " | |||
| f"{str(video_path)} &&" | |||
| f"rm -r {str(out_dir)}" | |||
| ) | |||
| print(ffmpeg_cmd, flush=True) | |||
| subprocess.Popen([ffmpeg_cmd], start_new_session=True, shell=True) | |||
| episode = record_episode | |||
| # Make new directory and start saving images | |||
| elif episode == -1 and record_episode != -1: | |||
| episode = record_episode | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| out_dir.mkdir(parents=True, exist_ok=True) | |||
| i = 0 | |||
| else: | |||
| continue | |||
| elif event["id"] == "image": | |||
| # Only record image when in episode. | |||
| # Episode 0 is for not recording periods. | |||
| if episode == -1: | |||
| continue | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| node.send_output( | |||
| "saved_image", | |||
| pa.array([{"path": f"videos/{fname}", "timestamp": i / FPS}]), | |||
| event["metadata"], | |||
| ) | |||
| image = event["value"].to_numpy().reshape((CAMERA_HEIGHT, CAMERA_WIDTH, 3)) | |||
| path = str(out_dir / f"frame_{i:06d}.png") | |||
| cv2.imwrite(path, image) | |||
| i += 1 | |||
+ 56
- 0
examples/reachy/nodes/plot_node.py
View File
| @@ -0,0 +1,56 @@ | |||
| import os | |||
| import cv2 | |||
| from dora import Node | |||
| IMAGE_WIDTH = int(os.getenv("IMAGE_WIDTH", "1280")) | |||
| IMAGE_HEIGHT = int(os.getenv("IMAGE_HEIGHT", "720")) | |||
| FONT = cv2.FONT_HERSHEY_SIMPLEX | |||
| node = Node() | |||
| joint = None | |||
| text = None | |||
| action = None | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| dora_id = event["id"] | |||
| if dora_id == "position": | |||
| joint = event["value"].to_numpy() | |||
| if "text" in dora_id: | |||
| text = event["value"][0].as_py() | |||
| if "action" in dora_id: | |||
| action = event["value"].to_numpy() | |||
| if dora_id == "image": | |||
| image = ( | |||
| event["value"].to_numpy().reshape((IMAGE_HEIGHT, IMAGE_WIDTH, 3)).copy() | |||
| ) | |||
| if action is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"action: {action}", | |||
| (20, 40), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 0), | |||
| 2, | |||
| ) | |||
| if joint is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"pos: {joint}", | |||
| (20, 20), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 100), | |||
| 2, | |||
| ) | |||
| cv2.imshow("frame", image) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
+ 156
- 0
examples/reachy/nodes/reachy_client.py
View File
| @@ -0,0 +1,156 @@ | |||
| import argparse | |||
| import os | |||
| import time | |||
| from pathlib import Path | |||
| # import h5py | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| from reachy2_sdk import ReachySDK | |||
| freq = 30 | |||
| ROBOT_IP = "192.168.1.51" | |||
| # ROBOT_IP = "localhost" | |||
| reachy = ReachySDK(ROBOT_IP) | |||
| SIMULATION = False | |||
| reachy.turn_on() | |||
| time.sleep(1) | |||
| action = [ | |||
| -0.11903145498601328, | |||
| 0.11292280260403312, | |||
| 0.48048914307403895, | |||
| -1.4491468779308918, | |||
| 0.1895427567665842, | |||
| 0.009599310885968814, | |||
| -0.20141099568014562, | |||
| 2.2656896114349365, | |||
| -0.13212142437597074, | |||
| -0.07731808586334879, | |||
| -0.5141739976375295, | |||
| -1.512502329778286, | |||
| 0.00034906585039886593, | |||
| 0.3193952531149623, | |||
| 0.40474185353748504, | |||
| 2.2610876560211, | |||
| ] | |||
| # reachy.l_arm.shoulder.pitch.goal_position = np.rad2deg(action[0]) | |||
| # reachy.l_arm.shoulder.roll.goal_position = np.rad2deg(action[1]) | |||
| # reachy.l_arm.elbow.yaw.goal_position = np.rad2deg(action[2]) | |||
| # reachy.l_arm.elbow.pitch.goal_position = np.rad2deg(action[3]) | |||
| # reachy.l_arm.wrist.roll.goal_position = np.rad2deg(action[4]) | |||
| # reachy.l_arm.wrist.pitch.goal_position = np.rad2deg(action[5]) | |||
| # reachy.l_arm.wrist.yaw.goal_position = np.rad2deg(action[6]) | |||
| # reachy.l_arm.gripper.set_opening(min(100, max(0, action[7] * 40))) | |||
| # reachy.r_arm.shoulder.pitch.goal_position = np.rad2deg(action[8]) | |||
| # reachy.r_arm.shoulder.roll.goal_position = np.rad2deg(action[9]) | |||
| # reachy.r_arm.elbow.yaw.goal_position = np.rad2deg(action[10]) | |||
| # reachy.r_arm.elbow.pitch.goal_position = np.rad2deg(action[11]) | |||
| # reachy.r_arm.wrist.roll.goal_position = np.rad2deg(action[12]) | |||
| # reachy.r_arm.wrist.pitch.goal_position = np.rad2deg(action[13]) | |||
| # reachy.r_arm.wrist.yaw.goal_position = np.rad2deg(action[14]) | |||
| # reachy.r_arm.gripper.set_opening(min(100, max(0, action[15] / 2.26 * 100))) | |||
| reachy.l_arm.goto_joints(action[0:7], duration=2.0, degrees=False) | |||
| reachy.r_arm.goto_joints(action[8:15], duration=2.0, degrees=False) | |||
| time.sleep(5) | |||
| node = Node() | |||
| for event in node: | |||
| id = event["id"] | |||
| match id: | |||
| case "action": | |||
| action = event["value"].to_numpy() | |||
| reachy.l_arm.shoulder.pitch.goal_position = np.rad2deg(action[0]) | |||
| reachy.l_arm.shoulder.roll.goal_position = np.rad2deg(action[1]) | |||
| reachy.l_arm.elbow.yaw.goal_position = np.rad2deg(action[2]) | |||
| reachy.l_arm.elbow.pitch.goal_position = np.rad2deg(action[3]) | |||
| reachy.l_arm.wrist.roll.goal_position = np.rad2deg(action[4]) | |||
| reachy.l_arm.wrist.pitch.goal_position = np.rad2deg(action[5]) | |||
| reachy.l_arm.wrist.yaw.goal_position = np.rad2deg(action[6]) | |||
| # reachy.l_arm.gripper.set_opening( | |||
| # min(100, max(0, action[7] / 2.26 * 100)) | |||
| # ) # replay true action value | |||
| reachy.l_arm.gripper.set_opening( | |||
| 0 if action[7] < 2.0 else 100 | |||
| ) # trick to force the gripper to close fully | |||
| reachy.r_arm.shoulder.pitch.goal_position = np.rad2deg(action[8]) | |||
| reachy.r_arm.shoulder.roll.goal_position = np.rad2deg(action[9]) | |||
| reachy.r_arm.elbow.yaw.goal_position = np.rad2deg(action[10]) | |||
| reachy.r_arm.elbow.pitch.goal_position = np.rad2deg(action[11]) | |||
| reachy.r_arm.wrist.roll.goal_position = np.rad2deg(action[12]) | |||
| reachy.r_arm.wrist.pitch.goal_position = np.rad2deg(action[13]) | |||
| reachy.r_arm.wrist.yaw.goal_position = np.rad2deg(action[14]) | |||
| # reachy.r_arm.gripper.set_opening( | |||
| # min(100, max(0, action[15] / 2.26 * 100)) | |||
| # ) # replay true action value | |||
| reachy.r_arm.gripper.set_opening( | |||
| 0 if action[15] < 2.0 else 100 | |||
| ) # trick to force the gripper to close fully | |||
| reachy.mobile_base.set_speed(action[16], action[17], np.rad2deg(action[18])) | |||
| reachy.head.neck.roll.goal_position = np.rad2deg(action[19]) | |||
| reachy.head.neck.pitch.goal_position = np.rad2deg(action[20]) | |||
| reachy.head.neck.yaw.goal_position = np.rad2deg(action[21]) | |||
| case "tick": | |||
| if not SIMULATION: | |||
| mobile_base_pos = reachy.mobile_base.odometry | |||
| else: | |||
| mobile_base_pos = {"vx": 0, "vy": 0, "vtheta": 0} | |||
| qpos = { | |||
| "l_arm_shoulder_pitch": np.deg2rad( | |||
| reachy.l_arm.shoulder.pitch.present_position | |||
| ), | |||
| "l_arm_shoulder_roll": np.deg2rad( | |||
| reachy.l_arm.shoulder.roll.present_position | |||
| ), | |||
| "l_arm_elbow_yaw": np.deg2rad(reachy.l_arm.elbow.yaw.present_position), | |||
| "l_arm_elbow_pitch": np.deg2rad( | |||
| reachy.l_arm.elbow.pitch.present_position | |||
| ), | |||
| "l_arm_wrist_roll": np.deg2rad( | |||
| reachy.l_arm.wrist.roll.present_position | |||
| ), | |||
| "l_arm_wrist_pitch": np.deg2rad( | |||
| reachy.l_arm.wrist.pitch.present_position | |||
| ), | |||
| "l_arm_wrist_yaw": np.deg2rad(reachy.l_arm.wrist.yaw.present_position), | |||
| "l_gripper": reachy.l_arm.gripper._present_position, | |||
| "r_arm_shoulder_pitch": np.deg2rad( | |||
| reachy.r_arm.shoulder.pitch.present_position | |||
| ), | |||
| "r_arm_shoulder_roll": np.deg2rad( | |||
| reachy.r_arm.shoulder.roll.present_position | |||
| ), | |||
| "r_arm_elbow_yaw": np.deg2rad(reachy.r_arm.elbow.yaw.present_position), | |||
| "r_arm_elbow_pitch": np.deg2rad( | |||
| reachy.r_arm.elbow.pitch.present_position | |||
| ), | |||
| "r_arm_wrist_roll": np.deg2rad( | |||
| reachy.r_arm.wrist.roll.present_position | |||
| ), | |||
| "r_arm_wrist_pitch": np.deg2rad( | |||
| reachy.r_arm.wrist.pitch.present_position | |||
| ), | |||
| "r_arm_wrist_yaw": np.deg2rad(reachy.r_arm.wrist.yaw.present_position), | |||
| "r_gripper": reachy.r_arm.gripper._present_position, | |||
| "mobile_base_vx": np.deg2rad(mobile_base_pos["vx"]), | |||
| "mobile_base_vy": np.deg2rad(mobile_base_pos["vy"]), | |||
| "mobile_base_vtheta": np.deg2rad(mobile_base_pos["vtheta"]), | |||
| "head_roll": np.deg2rad(reachy.head.neck.roll.present_position), | |||
| "head_pitch": np.deg2rad(reachy.head.neck.pitch.present_position), | |||
| "head_yaw": np.deg2rad(reachy.head.neck.yaw.present_position), | |||
| } | |||
| node.send_output("agent_pos", pa.array(qpos.values())) | |||
+ 73
- 0
examples/reachy/nodes/reachy_vision_client.py
View File
| @@ -0,0 +1,73 @@ | |||
| import argparse | |||
| import os | |||
| import time | |||
| from pathlib import Path | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| # import h5py | |||
| from pollen_vision.camera_wrappers.depthai import SDKWrapper | |||
| from pollen_vision.camera_wrappers.depthai.utils import get_config_file_path | |||
| freq = 30 | |||
| cam_name = "cam_trunk" | |||
| time.sleep(5) | |||
| cam = SDKWrapper(get_config_file_path("CONFIG_SR"), fps=freq) | |||
| # ret, image = cap.read() | |||
| import cv2 | |||
| import numpy as np | |||
| episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_teleop_remi") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| images = dataset[0]["observation.images.cam_trunk"] | |||
| ## Convert image from chw to hwc | |||
| # cv2.imwrite("test.jpg", (images.permute((1, 2, 0)).numpy() * 255).astype(np.uint8)) | |||
| images = images.permute((1, 2, 0)).numpy() * 255 | |||
| images = images.astype(np.uint8) | |||
| images = cv2.cvtColor(images, cv2.COLOR_RGB2BGR) | |||
| # start = time.time() | |||
| import PIL | |||
| import torch | |||
| # frame_hwc = (images.permute((1, 2, 0)) * 255).type(torch.uint8).cpu().numpy() | |||
| # PIL.Image.fromarray(frame_hwc).save( f"frame_.png") | |||
| node = Node() | |||
| index = 0 | |||
| for event in node: | |||
| # import cv2 | |||
| # while True: | |||
| id = event["id"] | |||
| cam_data, _, _ = cam.get_data() | |||
| left_rgb = cam_data["left"] | |||
| # cv2.imshow("frame", left_rgb) | |||
| # if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| # images = dataset[from_index.item() + index]["observation.images.cam_trunk"] | |||
| # images = images.numpy().transpose() * 255 | |||
| # images = images.astype(np.uint8) | |||
| # break | |||
| # index += 1 | |||
| # Convert image to BGR from RGB | |||
| left_rgb = cv2.cvtColor(left_rgb, cv2.COLOR_BGR2RGB) | |||
| node.send_output("cam_trunk", pa.array(left_rgb.ravel())) | |||
+ 21
- 0
examples/reachy/nodes/replay_node.py
View File
| @@ -0,0 +1,21 @@ | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| import time | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_teleop_remi") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| images = dataset[from_index.item()]["observation.images.cam_trunk"] | |||
| node = Node() | |||
| time.sleep(1) | |||
| for state in states: | |||
| node.send_output("agent_pos", pa.array(state.numpy())) | |||
| time.sleep(1 / 30) | |||
+ 103
- 0
examples/reachy1/README.md
View File
| @@ -0,0 +1,103 @@ | |||
| ## Reachy 2 | |||
| ### Installation | |||
| #### Installation SDK | |||
| ```bash | |||
| ### Install the sdk | |||
| git clone https://github.com/pollen-robotics/reachy2-sdk | |||
| cd reachy2-sdk | |||
| pip install -e . | |||
| cd .. | |||
| ### Connect Camera USB | |||
| echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules | |||
| sudo udevadm control --reload-rules && sudo udevadm trigger | |||
| ### Install Polen vision | |||
| git clone https://github.com/pollen-robotics/pollen-vision.git | |||
| cd pollen-vision | |||
| git checkout lerobot_only_left_camera | |||
| pip install ".[depthai_wrapper]" | |||
| cd .. | |||
| ### Teleoperation Collector | |||
| git clone https://github.com/pollen-robotics/reachy2_hdf5_recorder/ | |||
| ``` | |||
| #### Installation dora | |||
| ```bash | |||
| ## Create new python environment | |||
| git clone git@github.com:huggingface/dora_lerobot.git | |||
| pip install -e dora_lerobot | |||
| git clone git@github.com:dora-rs/dora-dora_lerobot.git --branch WORKING-REACHY | |||
| pip install -e dora-dora_lerobot/gym_dora | |||
| cargo install dora-rs --locked | |||
| pip install dora-rs | |||
| ``` | |||
| ### AI Pipeline | |||
| ### Data Collection | |||
| ```bash | |||
| cd reachy2_hdf5_recorder | |||
| python3 record_episodes_hdf5.py -n <recording_session_name>_raw -l <epiodes_duration in s> -r <framerate> --robot_ip <robot_ip> | |||
| ``` | |||
| ```bash | |||
| huggingface-cli upload \ | |||
| <hf-organisation>/<dataset_name> \ | |||
| data/<recording_session_name>_raw/ \ | |||
| --repo-type dataset (--private) | |||
| ``` | |||
| > ### 06/07/2021 | |||
| > | |||
| > As of today, we need to use several branches: | |||
| > | |||
| > - mobile_base : branch 21 # server side, install manually | |||
| > - reachy-sdk-api : branch 116 # server and client side, install manually | |||
| > - mobile-base-sdk : branch 25 # client side, install manually | |||
| > - reachy2-sdk-server : branch 135 # server side, install manually | |||
| > Then push to HF hub! | |||
| ### Training | |||
| ```bash | |||
| python dora_lerobot/scripts/train.py \ | |||
| policy=act_real \ | |||
| env=aloha_real \ | |||
| env.task=Reachy-v0 \ | |||
| dataset_repo_id=<org-id>/<data-id< \ | |||
| ``` | |||
| ### Evaluation | |||
| ```bash | |||
| dora start reachy/graphs/eval.yml --attach | |||
| ``` | |||
| ### Reachy Initialization | |||
| ```bash | |||
| ssh bedrock@192.168.1.51 | |||
| ``` | |||
| ```bash | |||
| cd dev_docker | |||
| sudo service stop | |||
| docker compose -f mode/dev.yaml up -d core | |||
| docker exec -it core bash | |||
| # In the docker container | |||
| ros2 launch reachy_bringup reachy.launch.py start_sdk_server:=true | |||
| ``` | |||
+ 80
- 0
examples/reachy1/graphs/eval.yml
View File
| @@ -0,0 +1,80 @@ | |||
| nodes: | |||
| - id: reachy-client | |||
| custom: | |||
| source: ../nodes/reachy_client.py | |||
| inputs: | |||
| action: eval/action | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - agent_pos | |||
| - id: reachy-vision-client | |||
| custom: | |||
| source: ../nodes/reachy_vision_client.py | |||
| args: ../nodes/reachy_vision_client.py | |||
| inputs: | |||
| tick: dora/timer/millis/33 | |||
| outputs: | |||
| - cam_trunk | |||
| - id: eval | |||
| custom: | |||
| source: /home/antoine/Pollen/dora_lerobot/dora_lerobot/scripts/eval.py | |||
| args: -p cadene/2024_06_06_act_reachy2_mobile_base_3_060000 eval.n_episodes=1 eval.batch_size=1 env.episode_length=20000 policy.n_action_steps=100 | |||
| # source: ../nodes/gym_dora_node.py | |||
| inputs: | |||
| agent_pos: reachy-client/agent_pos | |||
| cam_trunk: reachy-vision-client/cam_trunk | |||
| outputs: | |||
| - action | |||
| - id: plot | |||
| custom: | |||
| source: ../nodes/plot_node.py | |||
| inputs: | |||
| image: reachy-vision-client/cam_trunk | |||
| position: reachy-client/agent_pos | |||
| text_action: eval/action | |||
| envs: | |||
| IMAGE_WIDTH: 1280 | |||
| IMAGE_HEIGHT: 800 | |||
| - id: lerobot-record | |||
| custom: | |||
| build: cargo install --git https://github.com/dora-rs/dora dora-record | |||
| source: dora-record | |||
| inputs: | |||
| observation.state: reachy-client/agent_pos | |||
| action: eval/action | |||
| observation.images.cam_trunk: cam_saver_trunk/saved_image | |||
| episode_index: keyboard/space | |||
| - id: cam_saver_trunk | |||
| custom: | |||
| source: ../nodes/lerobot_webcam_saver.py | |||
| inputs: | |||
| image: reachy-vision-client/cam_trunk | |||
| record_episode: keyboard/space | |||
| outputs: | |||
| - saved_image | |||
| envs: | |||
| CAMERA_NAME: observation.images.cam_trunk | |||
| - id: keyboard | |||
| custom: | |||
| source: ../nodes/keyboard_node.py | |||
| inputs: | |||
| heartbeat: dora/timer/millis/20 | |||
| outputs: | |||
| - space | |||
| - failed | |||
| --- | |||
| - [ ] Add support for EoF action space recording and action | |||
| - [ ] Add support for tokenized action | |||
| - [ ] Add support for multiple images, videos, ... | |||
| - [ ] Add support for multiple actions | |||
| - [ ] Add support for multiple observations | |||
+ 74
- 0
examples/reachy1/graphs/qwenvl2.yml
View File
| @@ -0,0 +1,74 @@ | |||
| nodes: | |||
| - id: dora-reachy1 | |||
| build: pip install -e ../../../node-hub/dora-reachy1 | |||
| path: dora-reachy1 | |||
| inputs: | |||
| head_action: text-interpolation/head_action | |||
| antenna_action: text-interpolation/antenna_action | |||
| gripper_action: text-interpolation/gripper_action | |||
| r_arm_action: text-interpolation/r_arm_action | |||
| - id: keyboard-listener | |||
| build: pip install dora-keyboard | |||
| path: dora-keyboard | |||
| outputs: | |||
| - char | |||
| - id: key-interpolation | |||
| path: ../nodes/key_interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| outputs: | |||
| - r_arm_action | |||
| - head_action | |||
| - text | |||
| - id: text-interpolation | |||
| path: ../nodes/text_interpolation.py | |||
| inputs: | |||
| text: dora-qwenvl/tick | |||
| text_2: key-interpolation/text | |||
| outputs: | |||
| - head_action | |||
| - antenna_action | |||
| - gripper_action | |||
| - r_arm_action | |||
| - id: camera | |||
| build: pip install -e ../../../node-hub/dora-reachy1 | |||
| path: dora-reachy1-vision | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| textlog_vlm: dora-qwenvl/tick | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl | |||
| build: pip install -e ../../../../dora/node-hub/dora-qwenvl | |||
| path: dora-qwenvl | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| tick: dora/timer/millis/2000 | |||
| outputs: | |||
| - text | |||
| - tick | |||
| env: | |||
| DEFAULT_QUESTION: Respond with right, left, forward, backward, open, or close to grab the trash. | |||
| CUSTOM_MODEL_PATH: /home/peter/Documents/work/LLaMA-Factory/saves/qwen2_vl-2b/lora-dora-demo-trash-2/sft | |||
+ 73
- 0
examples/reachy1/graphs/qwenvl2_recorder.yml
View File
| @@ -0,0 +1,73 @@ | |||
| nodes: | |||
| - id: dora-reachy1 | |||
| build: pip install -e ../../../node-hub/dora-reachy1 | |||
| path: dora-reachy1 | |||
| inputs: | |||
| head_action: text-interpolation/head_action | |||
| antenna_action: text-interpolation/antenna_action | |||
| gripper_action: text-interpolation/gripper_action | |||
| r_arm_action: text-interpolation/r_arm_action | |||
| - id: keyboard-listener | |||
| build: pip install dora-keyboard | |||
| path: dora-keyboard | |||
| outputs: | |||
| - char | |||
| - id: key-interpolation | |||
| path: ../nodes/key_interpolation.py | |||
| inputs: | |||
| keyboard: keyboard-listener/char | |||
| outputs: | |||
| - text | |||
| - id: text-interpolation | |||
| path: ../nodes/text_interpolation.py | |||
| inputs: | |||
| text: dora-qwenvl-recorder/text | |||
| outputs: | |||
| - head_action | |||
| - antenna_action | |||
| - gripper_action | |||
| - r_arm_action | |||
| - question | |||
| - id: camera | |||
| build: pip install -e ../../../node-hub/dora-reachy1 | |||
| path: dora-reachy1-vision | |||
| inputs: | |||
| tick: dora/timer/millis/16 | |||
| outputs: | |||
| - image | |||
| env: | |||
| CAPTURE_PATH: 8 | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: plot | |||
| build: cargo install dora-rerun --locked | |||
| path: dora-rerun | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| textlog_vlm: dora-qwenvl-recorder/text | |||
| env: | |||
| IMAGE_WIDTH: 640 | |||
| IMAGE_HEIGHT: 480 | |||
| - id: dora-qwenvl-recorder | |||
| build: pip install -e ../../../../dora/node-hub/llama-factory-recorder | |||
| path: llama-factory-recorder | |||
| inputs: | |||
| image: | |||
| source: camera/image | |||
| queue_size: 1 | |||
| ground_truth: key-interpolation/text | |||
| text: text-interpolation/question | |||
| outputs: | |||
| - text | |||
| env: | |||
| # DEFAULT_QUESTION: Respond with look left, look right, look up, look down, wait, smile, or cry to look straight at the person and mimic his facial expression. | |||
| DEFAULT_QUESTION: Respond with right, left, forward, backward, open, or close to grab the trash. | |||
| LLAMA_FACTORY_ROOT_PATH: /home/peter/Documents/work/LLaMA-Factory | |||
+ 86
- 0
examples/reachy1/nodes/gym_dora_node.py
View File
| @@ -0,0 +1,86 @@ | |||
| import time | |||
| from pathlib import Path | |||
| import gymnasium as gym | |||
| import pandas as pd | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| import gym_dora # noqa: F401 | |||
| env = gym.make( | |||
| "gym_dora/DoraReachy2-v0", disable_env_checker=True, max_episode_steps=10000 | |||
| ) | |||
| observation = env.reset() | |||
| class ReplayPolicy: | |||
| def __init__(self, example_path, epidode=0): | |||
| df_action = pd.read_parquet(example_path / "action.parquet") | |||
| df_episode_index = pd.read_parquet(example_path / "episode_index.parquet") | |||
| self.df = pd.merge_asof( | |||
| df_action[["timestamp_utc", "action"]], | |||
| df_episode_index[["timestamp_utc", "episode_index"]], | |||
| on="timestamp_utc", | |||
| direction="backward", | |||
| ) | |||
| # self.df["episode_index"] = self.df["episode_index"].map(lambda x: x[0]) | |||
| self.df = self.df[self.df["episode_index"] == epidode] | |||
| self.current_time = self.df["timestamp_utc"].iloc[0] | |||
| self.topic = "action" | |||
| self.index = 0 | |||
| self.finished = False | |||
| def select_action(self, obs): | |||
| if self.index < len(self.df): | |||
| self.index += 1 | |||
| else: | |||
| self.finished = True | |||
| row = self.df.iloc[self.index] | |||
| delta_time = (row["timestamp_utc"] - self.current_time).microseconds | |||
| self.current_time = row["timestamp_utc"] | |||
| if delta_time > 0: | |||
| time.sleep(delta_time / 1_000_000) | |||
| return row[self.topic], self.finished | |||
| class ReplayLeRobotPolicy: | |||
| def __init__(self, episode=21): | |||
| self.index = 0 | |||
| self.finished = False | |||
| # episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_mobile_base") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| self.states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| self.actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| def select_action(self, obs): | |||
| if self.index < len(self.actions): | |||
| self.index += 1 | |||
| else: | |||
| self.finished = True | |||
| # time.sleep(1 / 30) | |||
| return self.actions[self.index].numpy(), self.finished | |||
| # policy = ReplayPolicy( | |||
| # Path( | |||
| # "/home/rcadene/dora-aloha/aloha/graphs/out/018fa076-ad19-7c77-afa4-49f7f072e86f" | |||
| # ) | |||
| # ) | |||
| policy = ReplayLeRobotPolicy() | |||
| done = False | |||
| while not done: | |||
| actions, finished = policy.select_action(observation) | |||
| observation, reward, terminated, truncated, info = env.step(actions) | |||
| # cv2.imshow("frame", observation["pixels"]["cam_trunk"]) | |||
| # if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| # break | |||
| if terminated: | |||
| print(observation, reward, terminated, truncated, info, flush=True) | |||
| done = terminated | truncated | done | finished | |||
| env.close() | |||
+ 41
- 0
examples/reachy1/nodes/key_interpolation.py
View File
| @@ -0,0 +1,41 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| if event["id"] == "keyboard": | |||
| char = event["value"][0].as_py() | |||
| step = 0.1 | |||
| if char == "w": | |||
| node.send_output("text", pa.array(["arm forward"])) | |||
| elif char == "s": | |||
| node.send_output("text", pa.array(["arm backward"])) | |||
| elif char == "d": | |||
| node.send_output("text", pa.array(["arm right"])) | |||
| elif char == "a": | |||
| node.send_output("text", pa.array(["arm left"])) | |||
| elif char == "e": | |||
| node.send_output("text", pa.array(["arm up"])) | |||
| elif char == "q": | |||
| node.send_output("text", pa.array(["arm down"])) | |||
| elif char == "t": | |||
| node.send_output("text", pa.array(["gripper close"])) | |||
| elif char == "r": | |||
| node.send_output("text", pa.array(["gripper open"])) | |||
| elif char == "6": | |||
| node.send_output("text", pa.array(["look right"])) | |||
| elif char == "4": | |||
| node.send_output("text", pa.array(["look left"])) | |||
| elif char == "8": | |||
| node.send_output("text", pa.array(["look up"])) | |||
| elif char == "2": | |||
| node.send_output("text", pa.array(["look down"])) | |||
| elif char == "7": | |||
| node.send_output("text", pa.array(["cry"])) | |||
| elif char == "9": | |||
| node.send_output("text", pa.array(["smile"])) | |||
| elif char == "5": | |||
| node.send_output("text", pa.array(["wait"])) | |||
+ 31
- 0
examples/reachy1/nodes/keyboard_node.py
View File
| @@ -0,0 +1,31 @@ | |||
| from pynput import keyboard | |||
| from pynput.keyboard import Key, Events | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| node = Node() | |||
| buffer_text = "" | |||
| space = False | |||
| submitted_text = [] | |||
| cursor = -1 | |||
| with keyboard.Events() as events: | |||
| while True: | |||
| event = events.get(0.1) | |||
| if event is not None and isinstance(event, Events.Press): | |||
| if event.key == Key.space and space == False: | |||
| cursor += 1 | |||
| node.send_output("space", pa.array([cursor])) | |||
| space = True | |||
| elif event is not None and isinstance(event, Events.Release): | |||
| if event.key == Key.space: | |||
| node.send_output("space", pa.array([-1])) | |||
| space = False | |||
| elif event.key == Key.backspace: | |||
| node.send_output("failed", pa.array([cursor])) | |||
| if node.next(0.001) is None: | |||
| break | |||
+ 78
- 0
examples/reachy1/nodes/lerobot_webcam_saver.py
View File
| @@ -0,0 +1,78 @@ | |||
| #!/usr/bin/env python3 | |||
| # -*- coding: utf-8 -*- | |||
| import os | |||
| import time | |||
| import numpy as np | |||
| import cv2 | |||
| import pyarrow as pa | |||
| from pathlib import Path | |||
| from dora import Node | |||
| import subprocess | |||
| node = Node() | |||
| CAMERA_NAME = os.getenv("CAMERA_NAME", "camera") | |||
| CAMERA_WIDTH = 1280 | |||
| CAMERA_HEIGHT = 800 | |||
| FPS = 30 | |||
| i = 0 | |||
| episode = -1 | |||
| dataflow_id = node.dataflow_id() | |||
| BASE = Path("out") / dataflow_id / "videos" | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| for event in node: | |||
| event_type = event["type"] | |||
| if event_type == "INPUT": | |||
| if event["id"] == "record_episode": | |||
| record_episode = event["value"].to_numpy()[0] | |||
| print(f"Recording episode {record_episode}", flush=True) | |||
| # Save Episode Video | |||
| if episode != -1 and record_episode == -1: | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| video_path = BASE / fname | |||
| # Save video | |||
| ffmpeg_cmd = ( | |||
| f"ffmpeg -r {FPS} " | |||
| "-f image2 " | |||
| "-loglevel error " | |||
| f"-i {str(out_dir / 'frame_%06d.png')} " | |||
| "-vcodec libx264 " | |||
| "-g 2 " | |||
| "-pix_fmt yuv444p " | |||
| f"{str(video_path)} &&" | |||
| f"rm -r {str(out_dir)}" | |||
| ) | |||
| print(ffmpeg_cmd, flush=True) | |||
| subprocess.Popen([ffmpeg_cmd], start_new_session=True, shell=True) | |||
| episode = record_episode | |||
| # Make new directory and start saving images | |||
| elif episode == -1 and record_episode != -1: | |||
| episode = record_episode | |||
| out_dir = BASE / f"{CAMERA_NAME}_episode_{episode:06d}" | |||
| out_dir.mkdir(parents=True, exist_ok=True) | |||
| i = 0 | |||
| else: | |||
| continue | |||
| elif event["id"] == "image": | |||
| # Only record image when in episode. | |||
| # Episode 0 is for not recording periods. | |||
| if episode == -1: | |||
| continue | |||
| fname = f"{CAMERA_NAME}_episode_{episode:06d}.mp4" | |||
| node.send_output( | |||
| "saved_image", | |||
| pa.array([{"path": f"videos/{fname}", "timestamp": i / FPS}]), | |||
| event["metadata"], | |||
| ) | |||
| image = event["value"].to_numpy().reshape((CAMERA_HEIGHT, CAMERA_WIDTH, 3)) | |||
| path = str(out_dir / f"frame_{i:06d}.png") | |||
| cv2.imwrite(path, image) | |||
| i += 1 | |||
+ 56
- 0
examples/reachy1/nodes/plot_node.py
View File
| @@ -0,0 +1,56 @@ | |||
| import os | |||
| import cv2 | |||
| from dora import Node | |||
| IMAGE_WIDTH = int(os.getenv("IMAGE_WIDTH", "1280")) | |||
| IMAGE_HEIGHT = int(os.getenv("IMAGE_HEIGHT", "720")) | |||
| FONT = cv2.FONT_HERSHEY_SIMPLEX | |||
| node = Node() | |||
| joint = None | |||
| text = None | |||
| action = None | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| dora_id = event["id"] | |||
| if dora_id == "position": | |||
| joint = event["value"].to_numpy() | |||
| if "text" in dora_id: | |||
| text = event["value"][0].as_py() | |||
| if "action" in dora_id: | |||
| action = event["value"].to_numpy() | |||
| if dora_id == "image": | |||
| image = ( | |||
| event["value"].to_numpy().reshape((IMAGE_HEIGHT, IMAGE_WIDTH, 3)).copy() | |||
| ) | |||
| if action is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"action: {action}", | |||
| (20, 40), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 0), | |||
| 2, | |||
| ) | |||
| if joint is not None: | |||
| cv2.putText( | |||
| image, | |||
| f"pos: {joint}", | |||
| (20, 20), | |||
| FONT, | |||
| 0.5, | |||
| (190, 250, 100), | |||
| 2, | |||
| ) | |||
| cv2.imshow("frame", image) | |||
| if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| break | |||
+ 156
- 0
examples/reachy1/nodes/reachy_client.py
View File
| @@ -0,0 +1,156 @@ | |||
| import argparse | |||
| import os | |||
| import time | |||
| from pathlib import Path | |||
| # import h5py | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| from reachy2_sdk import ReachySDK | |||
| freq = 30 | |||
| ROBOT_IP = "192.168.1.51" | |||
| # ROBOT_IP = "localhost" | |||
| reachy = ReachySDK(ROBOT_IP) | |||
| SIMULATION = False | |||
| reachy.turn_on() | |||
| time.sleep(1) | |||
| action = [ | |||
| -0.11903145498601328, | |||
| 0.11292280260403312, | |||
| 0.48048914307403895, | |||
| -1.4491468779308918, | |||
| 0.1895427567665842, | |||
| 0.009599310885968814, | |||
| -0.20141099568014562, | |||
| 2.2656896114349365, | |||
| -0.13212142437597074, | |||
| -0.07731808586334879, | |||
| -0.5141739976375295, | |||
| -1.512502329778286, | |||
| 0.00034906585039886593, | |||
| 0.3193952531149623, | |||
| 0.40474185353748504, | |||
| 2.2610876560211, | |||
| ] | |||
| # reachy.l_arm.shoulder.pitch.goal_position = np.rad2deg(action[0]) | |||
| # reachy.l_arm.shoulder.roll.goal_position = np.rad2deg(action[1]) | |||
| # reachy.l_arm.elbow.yaw.goal_position = np.rad2deg(action[2]) | |||
| # reachy.l_arm.elbow.pitch.goal_position = np.rad2deg(action[3]) | |||
| # reachy.l_arm.wrist.roll.goal_position = np.rad2deg(action[4]) | |||
| # reachy.l_arm.wrist.pitch.goal_position = np.rad2deg(action[5]) | |||
| # reachy.l_arm.wrist.yaw.goal_position = np.rad2deg(action[6]) | |||
| # reachy.l_arm.gripper.set_opening(min(100, max(0, action[7] * 40))) | |||
| # reachy.r_arm.shoulder.pitch.goal_position = np.rad2deg(action[8]) | |||
| # reachy.r_arm.shoulder.roll.goal_position = np.rad2deg(action[9]) | |||
| # reachy.r_arm.elbow.yaw.goal_position = np.rad2deg(action[10]) | |||
| # reachy.r_arm.elbow.pitch.goal_position = np.rad2deg(action[11]) | |||
| # reachy.r_arm.wrist.roll.goal_position = np.rad2deg(action[12]) | |||
| # reachy.r_arm.wrist.pitch.goal_position = np.rad2deg(action[13]) | |||
| # reachy.r_arm.wrist.yaw.goal_position = np.rad2deg(action[14]) | |||
| # reachy.r_arm.gripper.set_opening(min(100, max(0, action[15] / 2.26 * 100))) | |||
| reachy.l_arm.goto_joints(action[0:7], duration=2.0, degrees=False) | |||
| reachy.r_arm.goto_joints(action[8:15], duration=2.0, degrees=False) | |||
| time.sleep(5) | |||
| node = Node() | |||
| for event in node: | |||
| id = event["id"] | |||
| match id: | |||
| case "action": | |||
| action = event["value"].to_numpy() | |||
| reachy.l_arm.shoulder.pitch.goal_position = np.rad2deg(action[0]) | |||
| reachy.l_arm.shoulder.roll.goal_position = np.rad2deg(action[1]) | |||
| reachy.l_arm.elbow.yaw.goal_position = np.rad2deg(action[2]) | |||
| reachy.l_arm.elbow.pitch.goal_position = np.rad2deg(action[3]) | |||
| reachy.l_arm.wrist.roll.goal_position = np.rad2deg(action[4]) | |||
| reachy.l_arm.wrist.pitch.goal_position = np.rad2deg(action[5]) | |||
| reachy.l_arm.wrist.yaw.goal_position = np.rad2deg(action[6]) | |||
| # reachy.l_arm.gripper.set_opening( | |||
| # min(100, max(0, action[7] / 2.26 * 100)) | |||
| # ) # replay true action value | |||
| reachy.l_arm.gripper.set_opening( | |||
| 0 if action[7] < 2.0 else 100 | |||
| ) # trick to force the gripper to close fully | |||
| reachy.r_arm.shoulder.pitch.goal_position = np.rad2deg(action[8]) | |||
| reachy.r_arm.shoulder.roll.goal_position = np.rad2deg(action[9]) | |||
| reachy.r_arm.elbow.yaw.goal_position = np.rad2deg(action[10]) | |||
| reachy.r_arm.elbow.pitch.goal_position = np.rad2deg(action[11]) | |||
| reachy.r_arm.wrist.roll.goal_position = np.rad2deg(action[12]) | |||
| reachy.r_arm.wrist.pitch.goal_position = np.rad2deg(action[13]) | |||
| reachy.r_arm.wrist.yaw.goal_position = np.rad2deg(action[14]) | |||
| # reachy.r_arm.gripper.set_opening( | |||
| # min(100, max(0, action[15] / 2.26 * 100)) | |||
| # ) # replay true action value | |||
| reachy.r_arm.gripper.set_opening( | |||
| 0 if action[15] < 2.0 else 100 | |||
| ) # trick to force the gripper to close fully | |||
| reachy.mobile_base.set_speed(action[16], action[17], np.rad2deg(action[18])) | |||
| reachy.head.neck.roll.goal_position = np.rad2deg(action[19]) | |||
| reachy.head.neck.pitch.goal_position = np.rad2deg(action[20]) | |||
| reachy.head.neck.yaw.goal_position = np.rad2deg(action[21]) | |||
| case "tick": | |||
| if not SIMULATION: | |||
| mobile_base_pos = reachy.mobile_base.odometry | |||
| else: | |||
| mobile_base_pos = {"vx": 0, "vy": 0, "vtheta": 0} | |||
| qpos = { | |||
| "l_arm_shoulder_pitch": np.deg2rad( | |||
| reachy.l_arm.shoulder.pitch.present_position | |||
| ), | |||
| "l_arm_shoulder_roll": np.deg2rad( | |||
| reachy.l_arm.shoulder.roll.present_position | |||
| ), | |||
| "l_arm_elbow_yaw": np.deg2rad(reachy.l_arm.elbow.yaw.present_position), | |||
| "l_arm_elbow_pitch": np.deg2rad( | |||
| reachy.l_arm.elbow.pitch.present_position | |||
| ), | |||
| "l_arm_wrist_roll": np.deg2rad( | |||
| reachy.l_arm.wrist.roll.present_position | |||
| ), | |||
| "l_arm_wrist_pitch": np.deg2rad( | |||
| reachy.l_arm.wrist.pitch.present_position | |||
| ), | |||
| "l_arm_wrist_yaw": np.deg2rad(reachy.l_arm.wrist.yaw.present_position), | |||
| "l_gripper": reachy.l_arm.gripper._present_position, | |||
| "r_arm_shoulder_pitch": np.deg2rad( | |||
| reachy.r_arm.shoulder.pitch.present_position | |||
| ), | |||
| "r_arm_shoulder_roll": np.deg2rad( | |||
| reachy.r_arm.shoulder.roll.present_position | |||
| ), | |||
| "r_arm_elbow_yaw": np.deg2rad(reachy.r_arm.elbow.yaw.present_position), | |||
| "r_arm_elbow_pitch": np.deg2rad( | |||
| reachy.r_arm.elbow.pitch.present_position | |||
| ), | |||
| "r_arm_wrist_roll": np.deg2rad( | |||
| reachy.r_arm.wrist.roll.present_position | |||
| ), | |||
| "r_arm_wrist_pitch": np.deg2rad( | |||
| reachy.r_arm.wrist.pitch.present_position | |||
| ), | |||
| "r_arm_wrist_yaw": np.deg2rad(reachy.r_arm.wrist.yaw.present_position), | |||
| "r_gripper": reachy.r_arm.gripper._present_position, | |||
| "mobile_base_vx": np.deg2rad(mobile_base_pos["vx"]), | |||
| "mobile_base_vy": np.deg2rad(mobile_base_pos["vy"]), | |||
| "mobile_base_vtheta": np.deg2rad(mobile_base_pos["vtheta"]), | |||
| "head_roll": np.deg2rad(reachy.head.neck.roll.present_position), | |||
| "head_pitch": np.deg2rad(reachy.head.neck.pitch.present_position), | |||
| "head_yaw": np.deg2rad(reachy.head.neck.yaw.present_position), | |||
| } | |||
| node.send_output("agent_pos", pa.array(qpos.values())) | |||
+ 73
- 0
examples/reachy1/nodes/reachy_vision_client.py
View File
| @@ -0,0 +1,73 @@ | |||
| import argparse | |||
| import os | |||
| import time | |||
| from pathlib import Path | |||
| import numpy as np | |||
| import pyarrow as pa | |||
| from dora import Node | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| # import h5py | |||
| from pollen_vision.camera_wrappers.depthai import SDKWrapper | |||
| from pollen_vision.camera_wrappers.depthai.utils import get_config_file_path | |||
| freq = 30 | |||
| cam_name = "cam_trunk" | |||
| time.sleep(5) | |||
| cam = SDKWrapper(get_config_file_path("CONFIG_SR"), fps=freq) | |||
| # ret, image = cap.read() | |||
| import cv2 | |||
| import numpy as np | |||
| episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_teleop_remi") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| images = dataset[0]["observation.images.cam_trunk"] | |||
| ## Convert image from chw to hwc | |||
| # cv2.imwrite("test.jpg", (images.permute((1, 2, 0)).numpy() * 255).astype(np.uint8)) | |||
| images = images.permute((1, 2, 0)).numpy() * 255 | |||
| images = images.astype(np.uint8) | |||
| images = cv2.cvtColor(images, cv2.COLOR_RGB2BGR) | |||
| # start = time.time() | |||
| import PIL | |||
| import torch | |||
| # frame_hwc = (images.permute((1, 2, 0)) * 255).type(torch.uint8).cpu().numpy() | |||
| # PIL.Image.fromarray(frame_hwc).save( f"frame_.png") | |||
| node = Node() | |||
| index = 0 | |||
| for event in node: | |||
| # import cv2 | |||
| # while True: | |||
| id = event["id"] | |||
| cam_data, _, _ = cam.get_data() | |||
| left_rgb = cam_data["left"] | |||
| # cv2.imshow("frame", left_rgb) | |||
| # if cv2.waitKey(1) & 0xFF == ord("q"): | |||
| # images = dataset[from_index.item() + index]["observation.images.cam_trunk"] | |||
| # images = images.numpy().transpose() * 255 | |||
| # images = images.astype(np.uint8) | |||
| # break | |||
| # index += 1 | |||
| # Convert image to BGR from RGB | |||
| left_rgb = cv2.cvtColor(left_rgb, cv2.COLOR_BGR2RGB) | |||
| node.send_output("cam_trunk", pa.array(left_rgb.ravel())) | |||
+ 21
- 0
examples/reachy1/nodes/replay_node.py
View File
| @@ -0,0 +1,21 @@ | |||
| from lerobot.common.datasets.lerobot_dataset import LeRobotDataset | |||
| import time | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| episode = 1 | |||
| dataset = LeRobotDataset("cadene/reachy2_teleop_remi") | |||
| from_index = dataset.episode_data_index["from"][episode] | |||
| to_index = dataset.episode_data_index["to"][episode] | |||
| actions = dataset.hf_dataset["action"][from_index:to_index] | |||
| states = dataset.hf_dataset["observation.state"][from_index:to_index] | |||
| images = dataset[from_index.item()]["observation.images.cam_trunk"] | |||
| node = Node() | |||
| time.sleep(1) | |||
| for state in states: | |||
| node.send_output("agent_pos", pa.array(state.numpy())) | |||
| time.sleep(1 / 30) | |||
+ 72
- 0
examples/reachy1/nodes/text_interpolation.py
View File
| @@ -0,0 +1,72 @@ | |||
| from dora import Node | |||
| import pyarrow as pa | |||
| import numpy as np | |||
| node = Node() | |||
| for event in node: | |||
| if event["type"] == "INPUT": | |||
| text = event["value"][0].as_py() | |||
| text = text.lower() | |||
| text = text.replace(".", "") | |||
| head_step = 5 | |||
| step = 0.02 | |||
| if text == "look right": | |||
| node.send_output("head_action", pa.array([0, -head_step, 0])) | |||
| elif text == "look left": | |||
| node.send_output("head_action", pa.array([0, head_step, 0])) | |||
| elif text == "look up": | |||
| node.send_output( | |||
| "head_action", pa.array([head_step / 2, 0, -head_step / 2]) | |||
| ) | |||
| elif text == "look down": | |||
| node.send_output( | |||
| "head_action", pa.array([-head_step / 2, 0, head_step / 2]) | |||
| ) | |||
| elif text == "look up": | |||
| node.send_output( | |||
| "head_action", pa.array([head_step / 2, 0, -head_step / 2]) | |||
| ) | |||
| elif text == "look down": | |||
| node.send_output( | |||
| "head_action", pa.array([-head_step / 2, 0, head_step / 2]) | |||
| ) | |||
| elif text == "smile": | |||
| node.send_output("antenna_action", pa.array(["smile"])) | |||
| elif text == "cry": | |||
| node.send_output("antenna_action", pa.array(["cry"])) | |||
| elif text == "forward": | |||
| node.send_output("r_arm_action", pa.array([step, 0, 0])) | |||
| elif text == "backward": | |||
| node.send_output("r_arm_action", pa.array([-step, 0, 0])) | |||
| elif text == "right": | |||
| node.send_output("r_arm_action", pa.array([0, -step, 0])) | |||
| elif text == "left": | |||
| node.send_output("r_arm_action", pa.array([0, step, 0])) | |||
| elif text == "up": | |||
| node.send_output("r_arm_action", pa.array([0, 0, step])) | |||
| elif text == "down": | |||
| node.send_output("r_arm_action", pa.array([0, 0, -step])) | |||
| elif text == "open": | |||
| node.send_output( | |||
| "question", | |||
| pa.array( | |||
| [ | |||
| "Respond with right, left, forward, backward, open, or close to grab the trash" | |||
| ] | |||
| ), | |||
| ) | |||
| node.send_output("gripper_action", pa.array([-100])) | |||
| elif text == "close": | |||
| node.send_output( | |||
| "question", | |||
| pa.array( | |||
| [ | |||
| "Respond with right, left, forward, backward, open, or close to put the trash in your hand in the right bin" | |||
| ] | |||
| ), | |||
| ) | |||
| node.send_output("gripper_action", pa.array([100])) | |||
+ 12
- 0
examples/so100/ASSEMBLING.md
View File
| @@ -0,0 +1,12 @@ | |||
| # Dora pipeline for teleoperated low-cost arm and episode recording for LeRobot | |||
| SO-ARM100 is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Assembling | |||
| Follow the instructions in the [SO-ARM100 repository](https://github.com/TheRobotStudio/SO-ARM100) | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 75
- 0
examples/so100/CONFIGURING.md
View File
| @@ -0,0 +1,75 @@ | |||
| # Dora pipeline for teleoperated low-cost arm and episode recording for LeRobot | |||
| SO-ARM100 is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Configuring | |||
| Once you have assembled the robot, and installed the required software, you can configure the robot. It's essential to | |||
| configure it | |||
| correctly for the robot to work as expected. Here are the reasons why you need to configure the robot: | |||
| - You may have done some 'mistakes' during the assembly, like inverting the motors, or changing the offsets by rotating | |||
| the motors before assembling the robot. So your configuration will be different from the one we used to record the | |||
| data set. | |||
| - The recording pipeline needs to know the position of the motors to record the data set correctly. If the motors are | |||
| calibrated differently, the data set will be incorrect. | |||
| **Please read the instructions carefully before configuring the robot.** | |||
| The first thing to do is to configure the Servo BUS: | |||
| - Setting all the servos to the same baud rate (1M). | |||
| - Setting the ID of the servos from the base (1) to the gripper (6) for the Follower and Leader arms. | |||
| Those steps can be done using the official wizard provided by the | |||
| manufacturer [Feetech](https://gitee.com/ftservo/fddebug/blob/master/FD1.9.6(200107)-EN-U.7z). | |||
| After that, you need to configure the homing offsets and drive mode to have the same behavior for every user. We | |||
| recommend using our on-board tool to set all of that automatically: | |||
| - Connect the Follower arm to your computer. | |||
| - Retrieve the device port from the official wizard. | |||
| - Run the configuration tool with the following command and follow the instructions: | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| python ./examples/so100/configure.py --port /dev/ttyUSB0 --follower --left | |||
| ``` | |||
| **Note:** change `/dev/ttyUSB0` to the device port you retrieved from the official wizard (like `COM3` on Windows). | |||
| **Note:** The configuration tool will disable all torque so you can move the arm freely to the Position 1. | |||
| **Note:** You will be asked to set the arm in two different positions. The two positions are: | |||
|  | |||
| **Node:** You will be asked the path of the configuration file, you can press enter to use the default one. | |||
| This configuration has to be exported into environment variables inside the graph file. Here is an example of the | |||
| configuration: | |||
| ```YAML | |||
| nodes: | |||
| - id: so100-follower | |||
| env: | |||
| PORT: /dev/ttyUSB0 | |||
| CONFIG: ../configs/follower.left.json | |||
| - id: lcr-to-so100 | |||
| env: | |||
| FOLLOWER_CONTROL: ../configs/follower.left.json | |||
| ``` | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 82
- 0
examples/so100/INSTALLATION.md
View File
| @@ -0,0 +1,82 @@ | |||
| # Dora pipeline for teleoperated low-cost arm and episode recording for LeRobot | |||
| SO-ARM100 is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to manipulate the arms, the camera, and record/replay episodes with LeRobot. | |||
| ## Installation | |||
| Dataflow-oriented robotic application (Dora) is a framework that makes creation of robotic applications fast and simple. | |||
| See [Dora repository](https://github.com/dora-rs/dora). | |||
| **Please read the instructions carefully before installing the required software and environment to run the robot.** | |||
| You must install Dora before attempting to run the SO-ARM100 pipeline. Here are the steps to install Dora: | |||
| - Install Rust by following the instructions at [Rustup](https://rustup.rs/). (You may need to install Visual Studio C++ | |||
| build tools on Windows.) | |||
| - Install Dora by running the following command: | |||
| ```bash | |||
| cargo install dora-cli | |||
| ``` | |||
| Now you're ready to run Rust dataflow applications! We decided to only make Python dataflow for SO-ARM100, so | |||
| you may need to setup your Python environment: | |||
| - Install Python 3.10 or later by following the instructions at [Python](https://www.python.org/downloads/). | |||
| - Clone this repository by running the following command: | |||
| ```bash | |||
| git clone https://github.com/dora-rs/dora | |||
| ``` | |||
| - Open a bash terminal and navigate to the repository by running the following command: | |||
| ```bash | |||
| cd dora | |||
| ``` | |||
| - Create a virtual environment by running the following command (you can find where is all your pythons executable with | |||
| the command `whereis python3` on Linux, on default for Windows it's located | |||
| in `C:\Users\<User>\AppData\Local\Programs\Python\Python3.12\python.exe)`): | |||
| ```bash | |||
| path_to_your_python3_executable -m venv venv | |||
| ``` | |||
| - Activate the virtual environment and install the required Python packages by running the following command: | |||
| ```bash | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| pip install -r examples/so100/requirements.txt | |||
| ``` | |||
| If you want to install the required Python packages in development mode, you can run the following command, but you will | |||
| have to avoid using `dora build` during execution procedure: | |||
| ```bash | |||
| pip install -r examples/so100/development.txt # You **MUST** be inside dora to run this command | |||
| ``` | |||
| **Note**: You're totally free to use your own Python environment, a Conda environment, or whatever you prefer, you will | |||
| have to activate | |||
| your custom python environment before running `dora up && dora start [graph].yml`. | |||
| In order to record episodes, you need ffmpeg installed on your system. You can download it from | |||
| the [official website](https://ffmpeg.org/download.html). If you're on Windows, you can download the latest build | |||
| from [here](https://www.gyan.dev/ffmpeg/builds/). You can | |||
| extract the zip file and add the `bin` folder to your PATH. | |||
| If you're on Linux, you can install ffmpeg using the package manager of your distribution. ( | |||
| e.g `sudo apt install ffmpeg` on Ubuntu, `brew install ffmpeg` on macOS) | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||
+ 68
- 0
examples/so100/README.md
View File
| @@ -0,0 +1,68 @@ | |||
| # Dora pipeline for teleoperated low-cost arm and episode recording for LeRobot | |||
| SO-ARM100 is a low-cost robotic arm that can be teleoperated using a similar arm. This repository contains | |||
| the Dora pipeline to record episodes for LeRobot. | |||
| ## Assembling | |||
| Check the [ASSEMBLING.md](ASSEMBLING.md) file for instructions on how to assemble the robot from scratch. | |||
| ## Installations | |||
| Check the [INSTALLATIONS.md](INSTALLATION.md) file for instructions on how to install the required software and | |||
| environment | |||
| to run the robot. | |||
| ## Configuring | |||
| Check the [CONFIGURING.md](CONFIGURING.md) file for instructions on how to configure the robot to record episodes for | |||
| LeRobot and teleoperate the robot. | |||
| ## Recording | |||
| It's probably better to check the [examples](#examples) below before trying to record episodes. It will give you a | |||
| better | |||
| understanding of how Dora works. | |||
| Check the [RECORDING.md](RECORDING.md) file for instructions on how to record episodes for LeRobot. | |||
| ## Examples | |||
| There are also some other example applications in the `graphs` folder. Have fun! | |||
| Here is a list of the available examples: | |||
| There are also some other example applications in the `graphs` folder. Have fun! | |||
| Here is a list of the available examples: | |||
| - `mono_teleop_real_with_alexk_lcr.yml`: A simple real teleoperation pipeline that allows you to control a follower arm | |||
| using a leader | |||
| arm. It | |||
| does not record the episodes, so you don't need to have a camera. | |||
| You must configure the arms, retrieve the device port, and modify the file `mono_teleop_real_with_alexk_lcr.yml` to set | |||
| the correct | |||
| environment variables. (e.g. `PORT` and `CONFIG`, `LEADER_CONTROL` and `FOLLOWER_CONTROL`) | |||
| ```bash | |||
| cd dora/ | |||
| # If you are using a custom environment, you will have to activate it before running the command | |||
| source [your_custom_env_bin]/activate | |||
| # If you followed the installation instructions, you can run the following command | |||
| source venv/bin/activate # On Linux | |||
| source venv/Scripts/activate # On Windows bash | |||
| venv\Scripts\activate.bat # On Windows cmd | |||
| venv\Scripts\activate.ps1 # On Windows PowerShell | |||
| dora build ./examples/so100/graphs/mono_teleop_real_with_alexk_lcr.yml # Only the first time, it will install all the requirements if needed | |||
| dora up | |||
| dora start ./examples/so100/graphs/mono_teleop_real_with_alexk_lcr.yml | |||
| ``` | |||
| ## License | |||
| This library is licensed under the [Apache License 2.0](../../LICENSE). | |||